
 搜索
搜索

【1月科研速递】
成果上新!
我院科技工作者新创佳绩
获一系列重要成果
小编整理了12~1月部分科研亮点
邀您共览
【科研奖励】
我院吴祖煊老师荣获“上海科技青年35人引领计划”提名奖
人员 | 单位 | 研究方向 |
吴祖煊 | 复旦大学智能机器人与先进制造创新学院 | 智能视频计算理论及应用 |
新闻链接:https://mp.weixin.qq.com/s/KfrltglO0O7UitPe2IBI3A
【科研进展】
1、计算力学与人工智能交叉研究院在降噪超结构领域取得重要研究进展——相关成果发表于 International Journal of Extreme Manufacturing
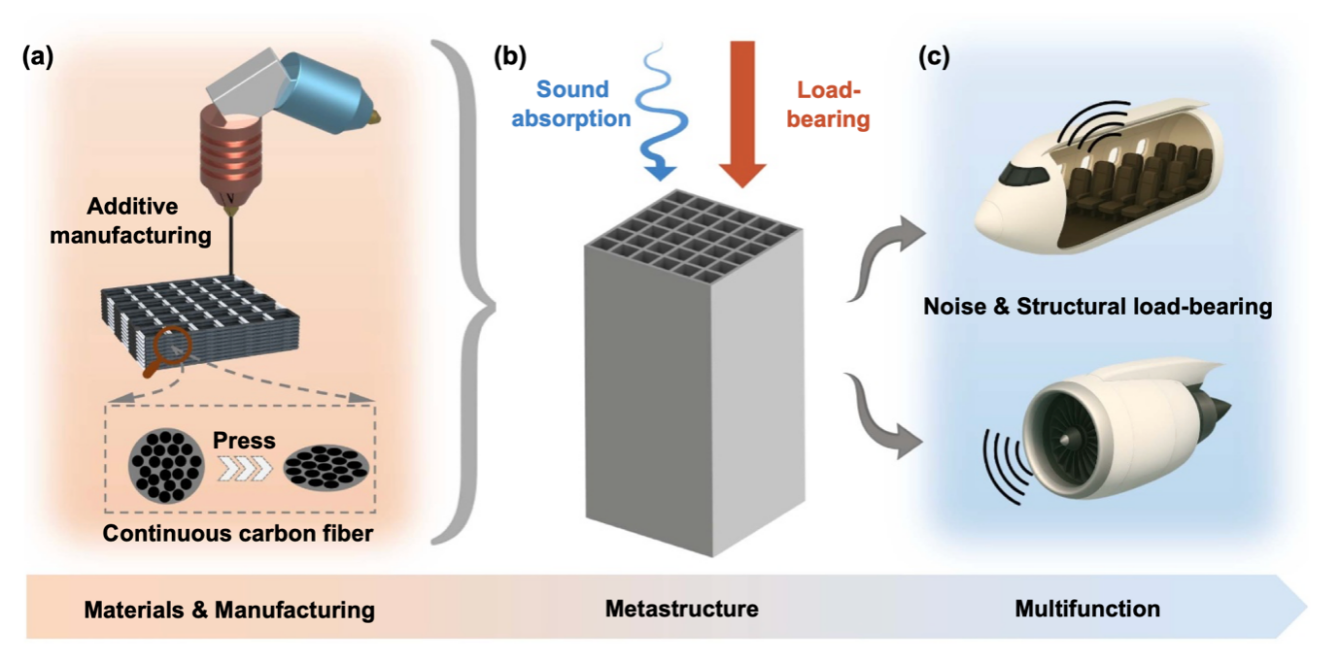
近日,我院/计算力学与人工智能交叉研究院科研团队在降噪超结构与结构功能一体化设计领域取得重要研究进展。相关研究成果以“Sound-absorbing continuous fiber-reinforced composite metastructure”为题,发表在国际先进制造领域权威期刊International Journal of Extreme Manufacturing。金亚斌和庄晓莹为论文通讯作者。该研究围绕极端环境下结构轻量化、高承载与宽带降噪难以兼顾这一关键问题,提出了一种基于连续纤维增强复合材料的超结构设计与制造新策略,在实现高效宽带吸声性能的同时显著提升了结构力学性能,为航空航天、先进交通与工程装备等领域的噪声控制提供了新的理论支撑和技术路径。
创新点:
结构-材料-制造一体化设计:不同于传统声学结构仅关注几何与声学机理的设计思路,该研究将超结构设计、连续纤维复合材料特性与增材制造工艺约束统一纳入同一设计框架,实现了多功能结构的协同设计。
宽带高效吸声与承载能力兼顾:实现了宽频段高吸声性能,并显著提升了结构整体刚度与强度,突破了传统吸声材料的强度和性能难以兼得的限制。
连续纤维路径引导的功能增强机制:通过合理的纤维铺设路径规划,连续纤维承担主要载荷,显著增强了结构在弯曲、压缩和剪切等典型工况下的承载能力与结构稳定性,充分发挥了连续纤维复合材料的各向异性力学优势。
该研究提出了一种面向极端环境的多功能复合材料声学超结构设计新范式,为实现轻量化、高承载与高效噪声控制的工程结构提供了可行方案。相关成果不仅拓展了连续纤维复合材料在声学领域的应用边界,也为未来多物理场耦合的功能结构设计提供了重要理论与技术参考。
原文链接:https://iopscience.iop.org/article/10.1088/2631-7990/ae35ea
2、梅永丰/黄高山/陈相仲团队Advanced Materials:一种面向颅内毒素清除的可超声追踪磁控微机器人
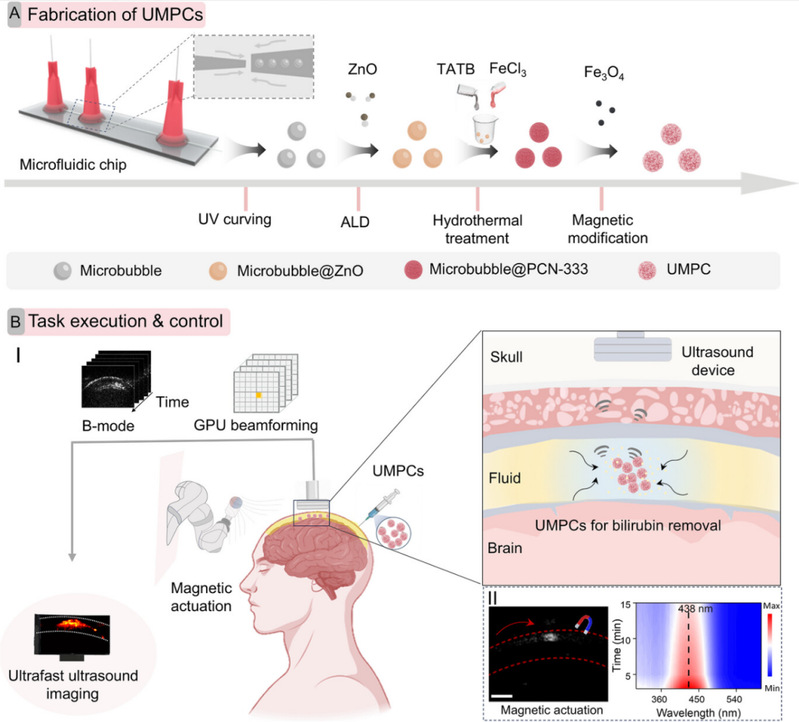
近日,我院梅永丰/黄高山/陈相仲团队联合复旦智慧医疗超声实验室许凯亮团队、东华大学生物医学工程学院刘宣勇/赵哲团队共同提出了一种名为“Ultrasound Microbubble@PCN-333(Fe)(UMPCs)”的多功能磁控微机器人,其独特设计实现了靶向导航、高效解毒与超声监测的三位一体,为体内精准医疗提供了新范式。相关成果发表在Advanced Materials,题目为MOF-Functionalized Ultrasound-Trackable Magnetic Microrobots for Intracranial Toxin Removal。
微机器人由三层核心功能结构组成:内部为含气芯结构的水凝胶微泡,可显著增强超声成像对比度,为实时超声追踪提供支撑;外层利用原子层沉积技术诱导生长有机金属框架(PCN-333)层,凭借多孔骨架结构提供的丰富位点和配体与胆红素分子之间相互作用,具备极强的胆红素吸附能力,可实现主动高效的胆红素捕获;表层修饰磁性氧化铁纳米颗粒,赋予微机器人磁响应运动能力,可在外部磁场引导下精准穿梭于复杂生理环境。微机器人系统整合了超声实时追踪功能,能够精准定位微机器人在体内的运动位置,实现“导航-吸附-监测”多功能集成及闭环治疗。通过体外胆红素吸附实验与兔颅内活体实验,充分验证了该技术的有效性。此外,其设计理念还可延伸至关节腔、膀胱等封闭生理环境的其他毒素清除,为多种毒性代谢物相关疾病的治疗提供了通用型解决方案。未来,该技术有望为急性胆红素脑病等疾病患者带来更安全、有效的治疗选择,推动以微型机器人为平台的靶向解毒疗法进入精准化、微创化的新时代。
论文第一作者为我院博士生梅宇和复旦大学智慧医疗超声实验室博士生程双毅;通讯作者为东华大学生物医学工程学院赵哲副研究员,复旦大学智慧医疗超声实验室许凯亮研究员,我院陈相仲青年研究员、梅永丰教授、黄高山教授。该研究得到了复旦大学附属华山医院运动医学科和中国科学院上海硅酸盐研究所的大力支持,获得国家重点研发计划、国家自然科学基金、上海市科委等项目资助。
文章链接:https://doi.org/10.1002/adma.202516357
3、张树宇/区琼荣团队Carbon Energy:“双管齐下”策略构筑高效稳定阴离子交换膜电解水制氢阳极
近期,我院张树宇、区琼荣团队针对NiFe基OER电极在AEMWE中面临的催化剂与基底结合力弱、高氧化电位下Fe活性位发生电化学溶解这两大核心失效机制,提出了一种基于“双重策略”的NiFe析氧电极构筑路线。首先,通过等离子体改性基底增强催化剂与基底之间的相互作用,从而提高电极在高电流密度析氧条件下的机械稳定性;同时,引入有机磷配位保护层,有效抑制Fe活性位在强氧化电位下的电化学溶解,并促进氧析出反应动力学(图1)。该成果以“A ‘Two‐Pronged’ Strategy Boosting the Activity and Stability of Nickel-Iron Catalysts Toward Anion Exchange Membrane Water Electrolysis”为题发表在Carbon Energy上。
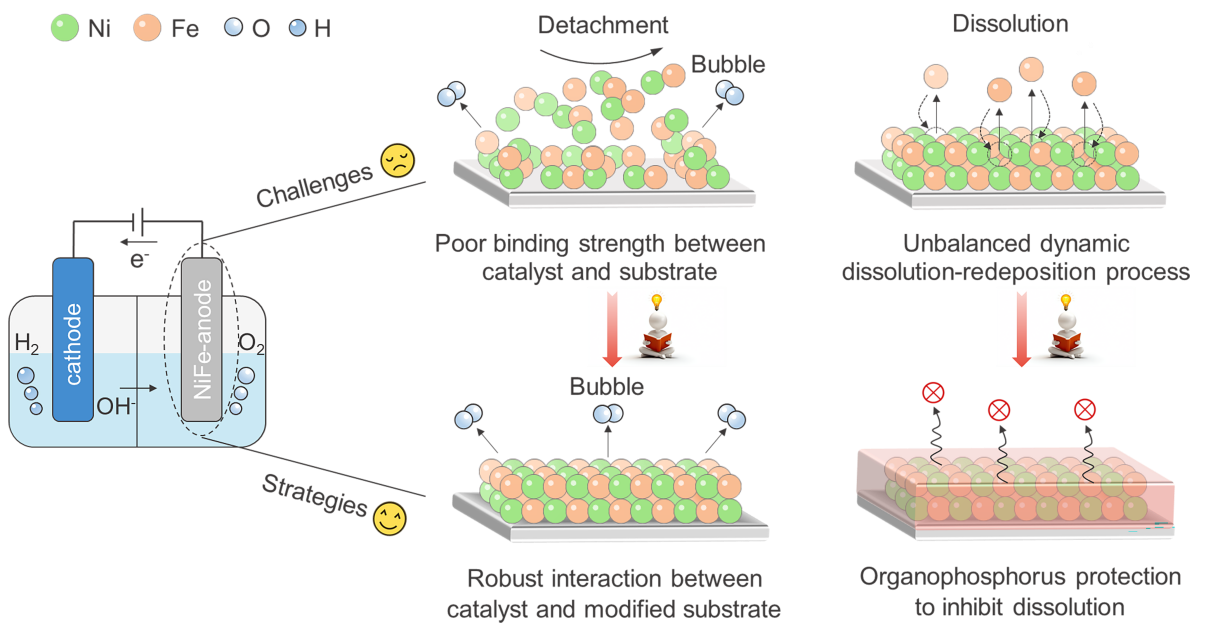
研究问题与“双重策略”总体示意图
该研究提出了一种针对NiFe基OER电极的“双重策略”设计方法,实现了活性与稳定性的协同提升。所构建的MS-NiFeLDH@PTA电极在高电流密度下展现出优异的OER性能和长期运行稳定性,并在AEMWE装置中实现低槽压、低能耗的稳定制氢。该工作为AEMWE制氢技术的降本增效和工程化应用提供了极具价值的新思路。
我院2023级博士生周岩松和南京林业大学徐天泽博士为该论文共同第一作者,我院区琼荣教授与张树宇副研究员为论文的通讯作者。该工作得到了国家自然科学基金、上海市科委等项目的资助和支持。
原文链接:https://onlinelibrary.wiley.com/doi/10.1002/cey2.70140
4、可信具身智能研究院LRANet++:基于低秩近似网络的实时端到端文本识别器
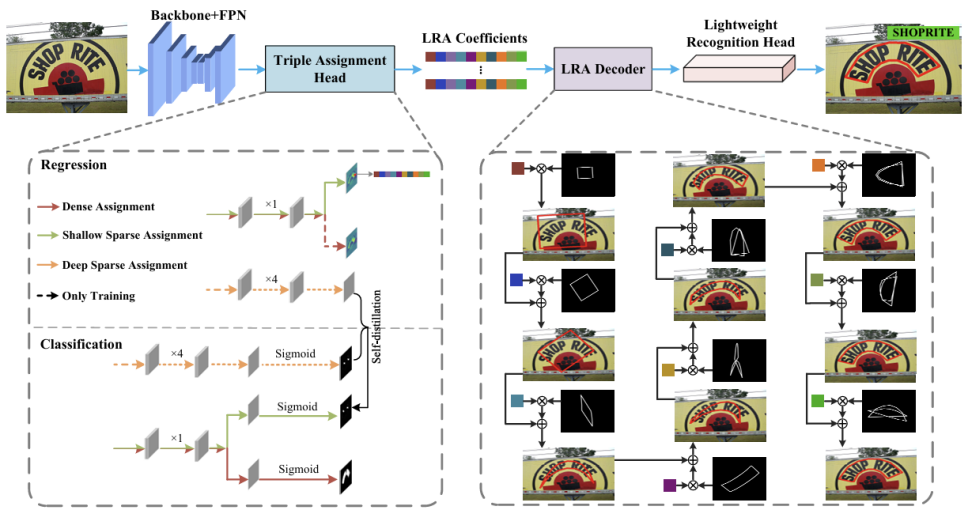
近日,我院可信具身智能研究院在端到端文本识别领域取得重要进展,相关成果以 “LRANet++: Low-Rank Approximation Network for Accurate and Efficient Text Spotting” 为题发表于《IEEE Transactions on Pattern Analysis and Machine Intelligence》(IEEE TPAMI)。端到端文本识别是视觉问答、文档理解及多模态智能体交互等领域的关键感知入口,但该方向长期受困于精度与效率难以兼具的瓶颈,严重制约了其在实时复杂场景中的大规模落地应用。针对这一挑战,本研究从底层表征与架构解耦的视角出发,探索出一条兼顾高精度与高效率的新路径。团队首先定量揭示了精准定位是高质量识别的前置根本,创新性地将任意形状文本检测建模为数据驱动下的低秩子空间重构问题,利用基于l1范数最小化的快速中值子空间投影,有效克服了人工标注噪声干扰,仅需少量系数即可鲁棒表征复杂轮廓。同时,本研究设计了“教师–学生–辅助”架构的三重分配检测头,通过自蒸馏机制实现了复杂特征学习与极致轻量推理的高效协同。此外,针对当前单阶段方法的流行趋势,本研究通过结合大尺度图像缩放策略与轻量级Transformer识别头,重新验证了经典的RoI两阶段范式依然具备超越最新单阶段方法的卓越潜力。实验结果表明,LRANet++在多个极具挑战的数据集上取得了领先的速度-精度结果。例如,在 CTW1500上首次突破70%的F-measure,且速度比现有最佳方法快3.5倍 ,同时在中文ReCTS及越南语VinText等多语言基准上均取得了SOTA性能。
论文第一作者为2023级博士生苏宇辰,通讯作者为我院陈智能教授。研究得到国家自然科学基金和上海市科委项目资助。
论文作者:苏宇辰, 陈智能, 杜永坤, 吴祖煊, 谢洪涛, 姜育刚
原文链接:https://ieeexplore.ieee.org/abstract/document/11328880/
5、张立华团队ICLR 2026:融合像素与基因,构建空间感知的计算病理学多模态表征学习框架
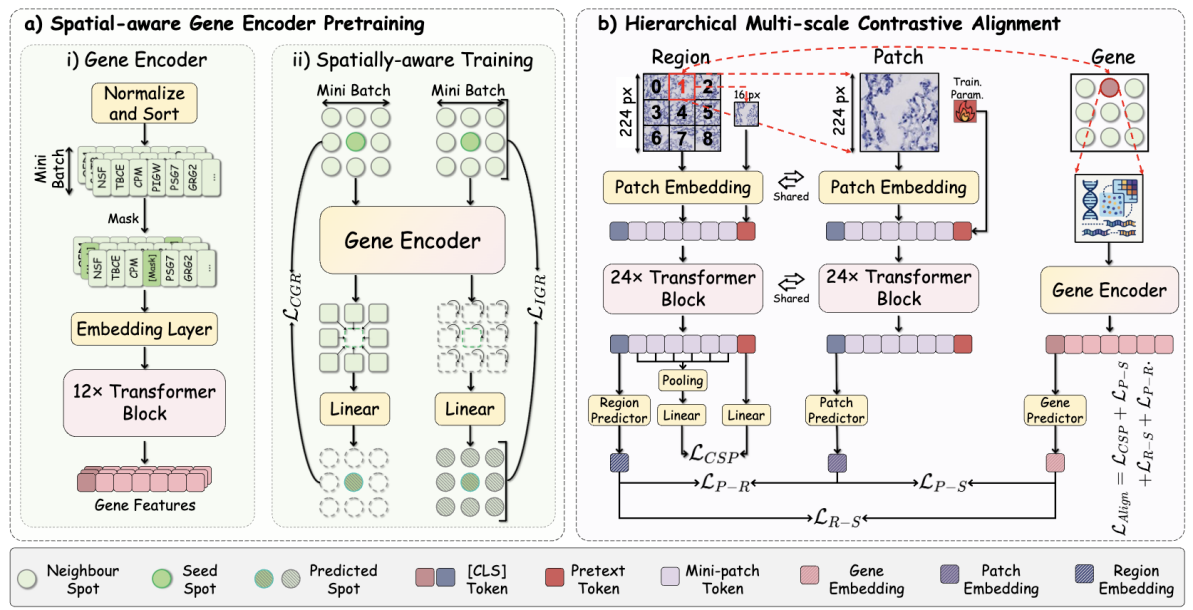
近日,我院张立华教授团队在计算病理学与多模态表征学习领域取得突破性进展,研究论文《Fusing Pixels and Genes: Spatially-Aware Learning in Computational Pathology》已被ICLR 2026 接收发表 。该研究针对传统计算病理模型多依赖视觉与文本对齐、缺乏分子维度特异性且难以揭示深层生物机制的瓶颈,提出了 STAMP 框架。STAMP 创新性地利用空间转录组(ST)数据作为监督信号,实现了病理图像形态特征与基因表达谱分子信号的深度对齐。为支撑这一大规模预训练模型,团队构建了大规模 Visium 空间转录组数据集 SpaVis-6M,涵盖 35 个器官、1982 张切片的 575 万条基因表达记录,为构建鲁棒、任务无关的病理图像表征奠定了坚实的数据基础。
核心创新点:
该研究提出了一种空间感知的两阶段预训练范式,有效捕捉了组织内的空间依赖性和分层特征。在基因编码阶段,模型通过空间感知采样与邻域训练目标,深入学习组织空间中的基因共表达模式与邻里上下文 ;在多模态对齐阶段,STAMP 引入了层次化多尺度对比学习与跨尺度补丁定位机制,模拟病理医生在诊断过程中的缩放观察行为,增强了视觉编码器感知空间关系的能力。此外,团队设计了一种统一的对齐损失函数,协同结合空间定位、模态间特征匹配及模态内多尺度一致性目标,使模型在细胞分类、空间域聚类及基因表达预测等六个数据集的四项下游任务中均取得了 SOTA 性能。这一成果不仅突破了形态学与分子信息融合的技术瓶颈,也为癌症微环境分析和个性化精准医疗提供了全新的技术范式。
论文第一作者为2022级直博生韩铭浩,我院张立华教授与杨鼎康博士为论文的通讯作者。
原文链接:https://openreview.net/forum?id=uVXO6gzVzj
6、认知与智能技术实验室ICRA 2026:MUJICA:面向轮足机器人的多技能统一运动控制框架
近日,我院认知与智能技术实验室(简称CITLab)撰写的题为《MUJICA: Multi-skill Unified Joint Integration of Control Architecture for Wheeled-Legged Robots》的学术论文被2026 IEEE International Conference on Robotics & Automation(ICRA 2026)录用。
轮足机器人兼具轮式高效移动与足式越障能力,是未来复杂环境中自主作业的理想平台。然而,如何在一个统一的策略中集成多种差异巨大的高难度技能,并确保其在真实世界中的安全性和鲁棒性,一直是该领域的核心挑战。针对上述难题,本研究创新性地提出了MUJICA框架。该框架首次在单一盲策略(仅依赖本体感知)中,成功集成了全向移动、高台攀爬以及任意姿态下的跌倒恢复等多样化且极具挑战性的技能。其核心创新在于:一是在观测中引入技能指示变量来实现多种技能的协同学习;二是设计了基于电机硬约束的安全感知学习框架,通过精确建模直流电机的速度-力矩物理特性,有效保障了仿真到真实环境的zero-shot迁移;三是引入了一个高层技能选择器,能够仅根据本体感知信息,自动、无缝地在不同技能间进行切换,从而实现对复杂未知环境的自主适应。
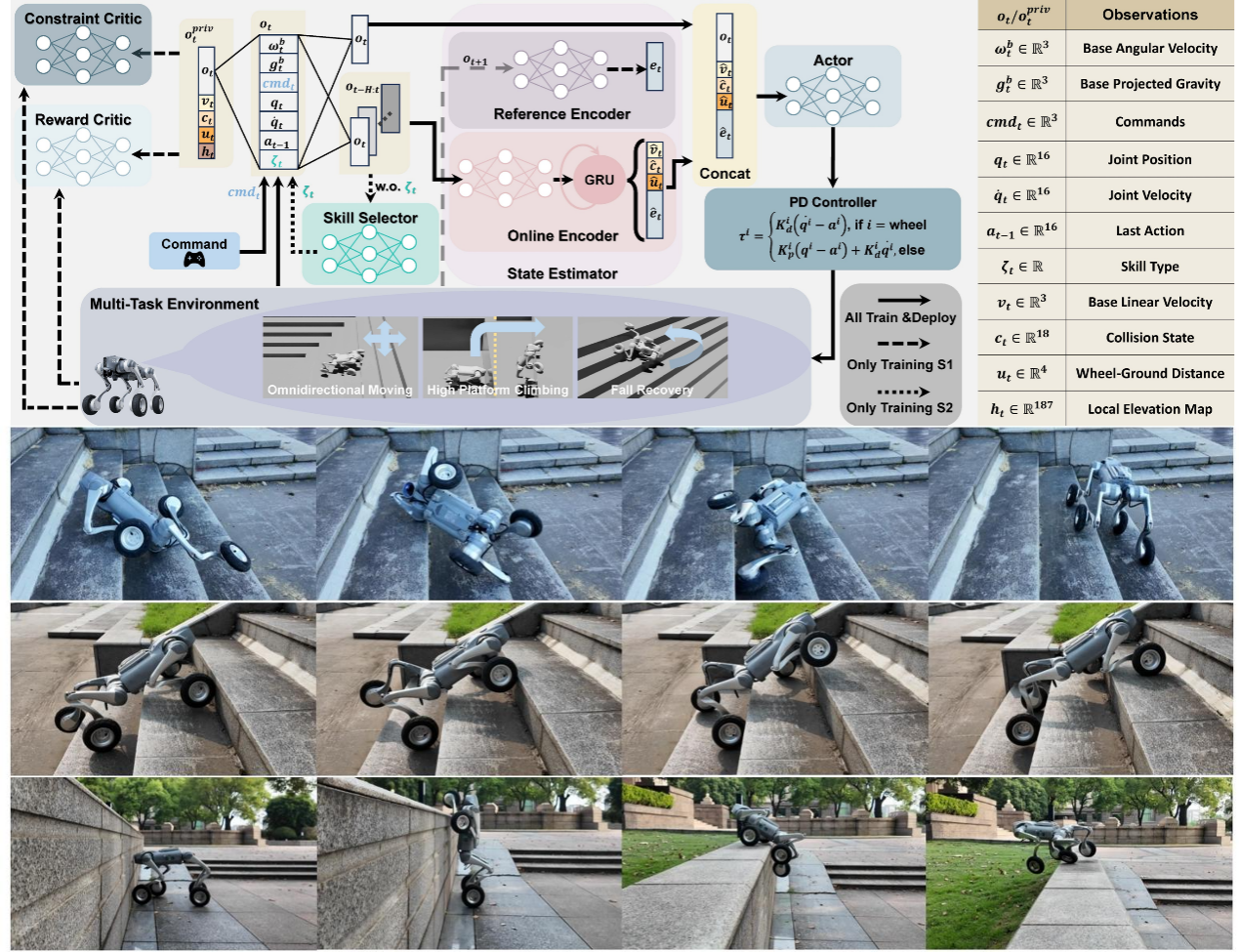
研究团队在Unitree Go2-W轮足机器人上进行了大量仿真与真实世界实验。实验结果表明,MUJICA不仅能在单一任务上达到卓越性能,更能实现多个技能的自主串联执行。同时,该工作是首个实现轮足机器人1米高台攀爬的成果,充分挖掘了其极限运动潜能。该研究为轮足机器人在灾难救援等非结构化复杂场景中的应用奠定了坚实的技术基础,展示了其在自主性与适应性方面的巨大潜力。
论文第一作者为2024级硕士生李彧祺,我院张立华教授与翟鹏青年研究员为论文的通讯作者。
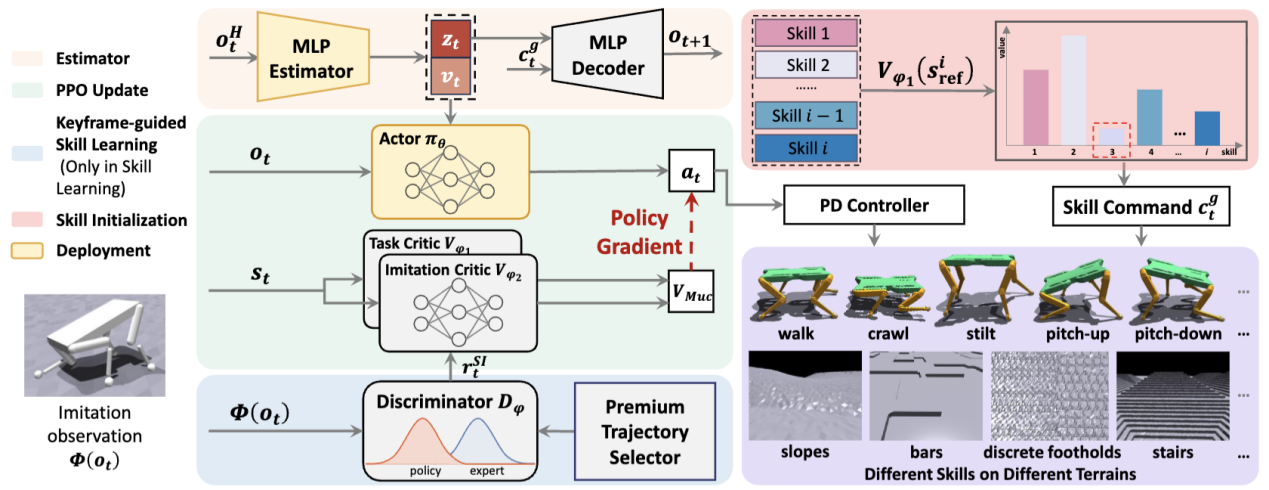
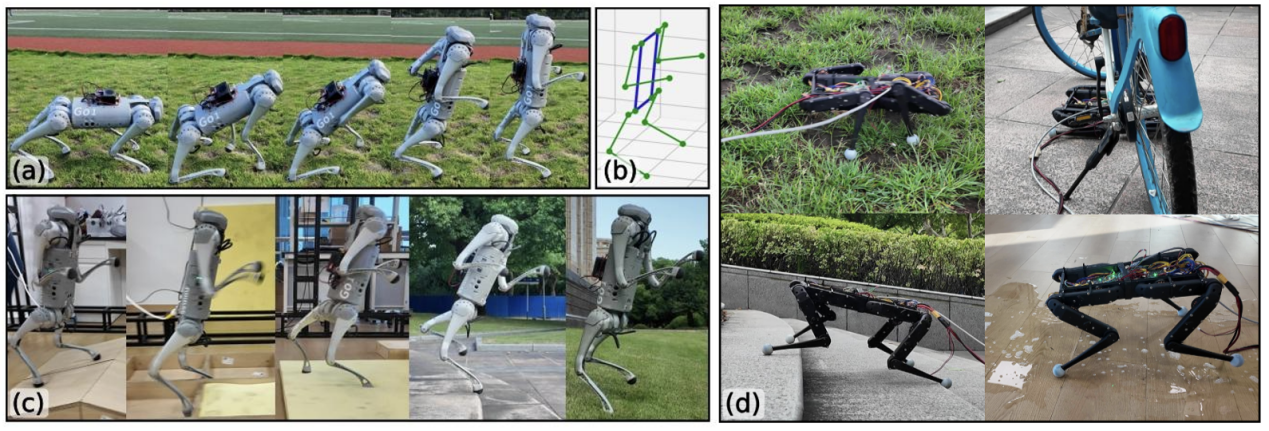
7、认知与智能技术实验室ICRA 2026:KiRAS:关键帧引导自模仿的四足机器人多技能鲁棒学习框架
近日,我院认知与智能技术实验室(简称CITLab)在四足机器人多技能鲁棒自适应行走领域取得重要进展,相关成果以“KiRAS: Keyframe Guided Self-Imitation for Robust and Adaptive Skill Learning in Quadruped Robots”为题被IEEE International Conference on Robotics and Automation 2026(ICRA 2026)录用。
现有四足机器人多技能学习方法受限于复杂地形数据集稀缺,难以兼顾技能多样性与地形适应性。本研究创新性采用关键帧作为轻量化技能表征,提出端到端KiRAS框架,通过单关键帧引导自模仿学习在平地获取行走、爬行、双足站立等多样化技能,再经同一策略网络微调复杂地形鲁棒性。实验在 Solo-8和 Unitree Go1 机器人上进行了验证。该框架支持跨自由度平台迁移与新技能快速扩展,展现出作为轻量化多技能生成与数据集收集平台的潜力;进一步实现了灵活的技能转换,助力机器人在复杂地形中提升移动性能,为野外勘探、工业巡检等复杂场景下的机器人应用提供高效解决方案。
论文第一作者为23级直博生魏潇逸,通讯作者为我院张立华教授和翟鹏青年研究员。
8、认知与智能技术实验室ICRA 2026:RENet:一种基于冗余估计器网络的四足机器人视觉容错控制框架
近日,我院认知与智能技术实验室(简称CITLab)撰写题为《RENet: Fault-Tolerant Motion Control for Quadruped Robots via Redundant Estimator Networks under Visual Collapse》的学术论文被IEEE International Conference on Robotics and Automation 2026(ICRA 2026)录用。基于视觉的户外环境运动控制对四足机器人提出了巨大挑战。在真实环境部署中,如何实现精确的环境预测并有效应对深度传感器噪声仍面临巨大挑战,这严重限制了此类算法在户外的应用。为解决视觉运动控制在部署中的这些问题,本文提出了一种冗余估计器网络(Redundant Estimator Network, RENet)框架。该框架采用双估计器架构,在机载视觉失效的情况下,既能保证运动性能的鲁棒性,又能维持部署的稳定性。通过在线估计器自适应机制,我们的方法能够在处理视觉感知不确定性时,实现不同估计模块之间的无缝切换。实地机器人实验验证了该框架在复杂户外环境中的有效性,尤其在视觉感知退化的场景中展现出明显优势。该框架显示出其作为一种实用方案,在复杂野外条件下实现可靠机器人部署的潜力。
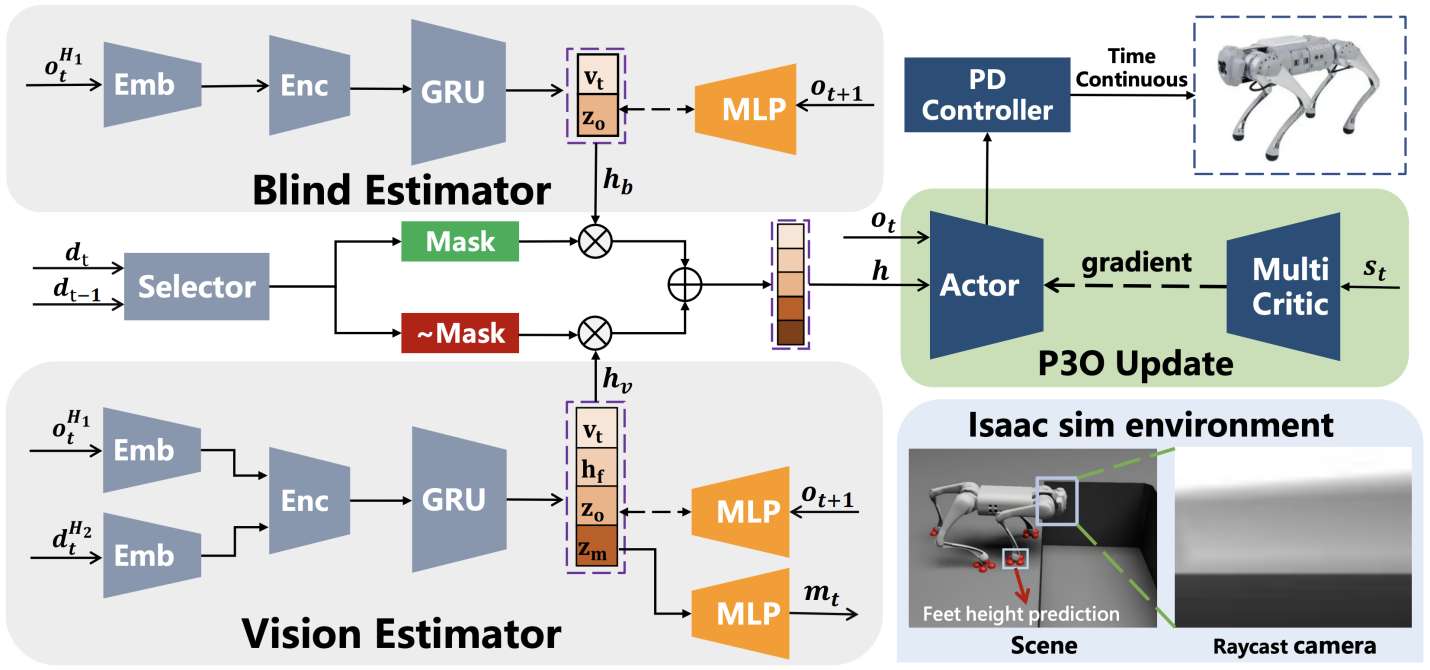
论文主要完成人有23级硕士生张钺奇(共同第一作者)、24级直博生钱荃橙(共同第一作者)、23级博士生侯泰先,通讯作者是我院张立华教授和翟鹏青年研究员。
原文链接:https://ieeexplore.ieee.org/document/11155164
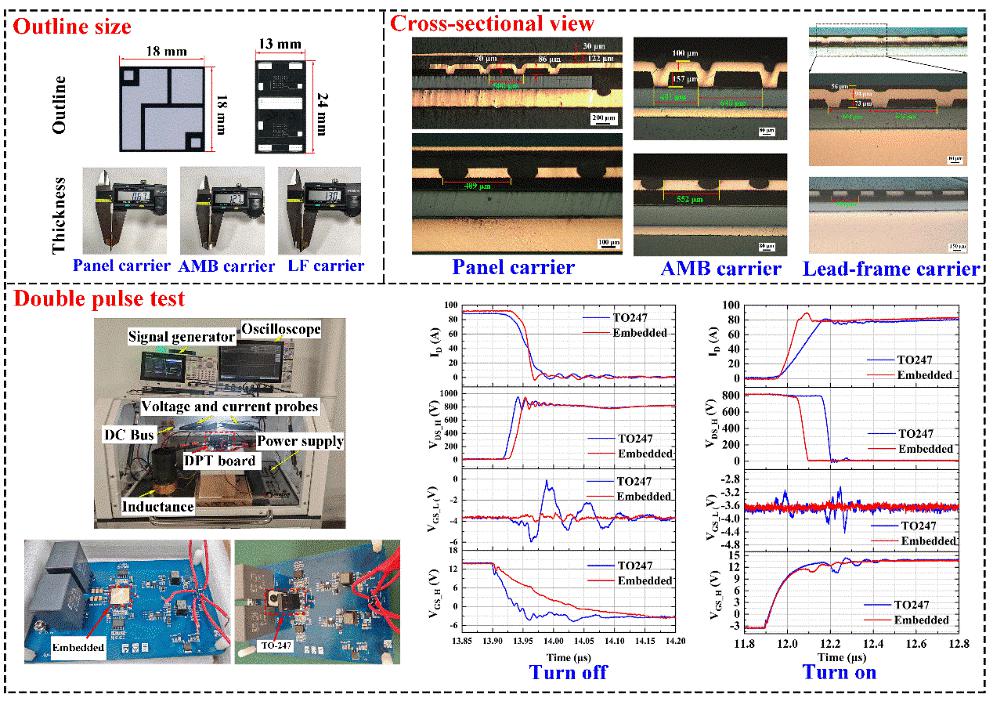
9、超越照明所樊嘉杰青年研究员团队IEEE Transactions on Power Electronics: 兼具低热阻与低寄生电感的PCB埋入式碳化硅半桥封装
近期,我院超越照明所、上海市碳化硅功率器件工程技术研究中心樊嘉杰青年研究员团队在电力电子领域取得重要进展,相关成果以《Design and Analysis of PCB Embedded SiC Half-Bridge Packaging Cells with Low Thermal Resistance and Parasitic Inductance》为题发表于领域高水平期刊《IEEE Transactions on Power Electronics》。
该研究针对传统引线键合封装在高频下寄生电感大、开关应力高的问题,创新提出基于PCB埋入式重布线层技术(RDL)的1200V SiC MOSFET半桥封装方案,通过单层RDL实现器件栅、源、漏三极的平面互连,并系统对比了Panel面板、活性金属钎焊基板(AMB)及引线框架三种载板结构对封装电、热、力学性能的影响。在电性能方面,三种封装单元均实现功率回路寄生电感低于5 nH,其中Panel载板在10 MHz下表现出最优的2.4 nH功率回路电感和1.57 nH栅极回路电感,双脉冲实验进一步验证其在相同电压过冲下可实现更高开关速度并降低损耗;在热性能方面,引线框架载板热阻最低,AMB次之,Panel在单面散热时热阻较高但双面冷却条件下显著改善,展现出在双面散热模块中的应用潜力;在力学性能方面,AMB载板形成的“三明治结构”可有效缓冲热应力,使最大等效应力与整体翘曲分别降低约34%和75%。综合看,引线框架方案具有替代传统TO封装的潜力,AMB方案在热、力、绝缘性能间取得优异平衡,适用于新能源汽车牵引逆变器等高性能场景,Panel方案则在双面冷却架构中具备良好前景,为下一代高性能、高密度、微型化SiC功率模块封装的开发提供了重要的技术路径与理论支撑。
论文第一作者为24级博士生顾超,通讯作者为我院樊嘉杰青年研究员。研究得到国家自然科学基金面上项目、国家留学基金委等项目资助。
文章链接:DOI: 10.1109/TPEL.2025.3639926
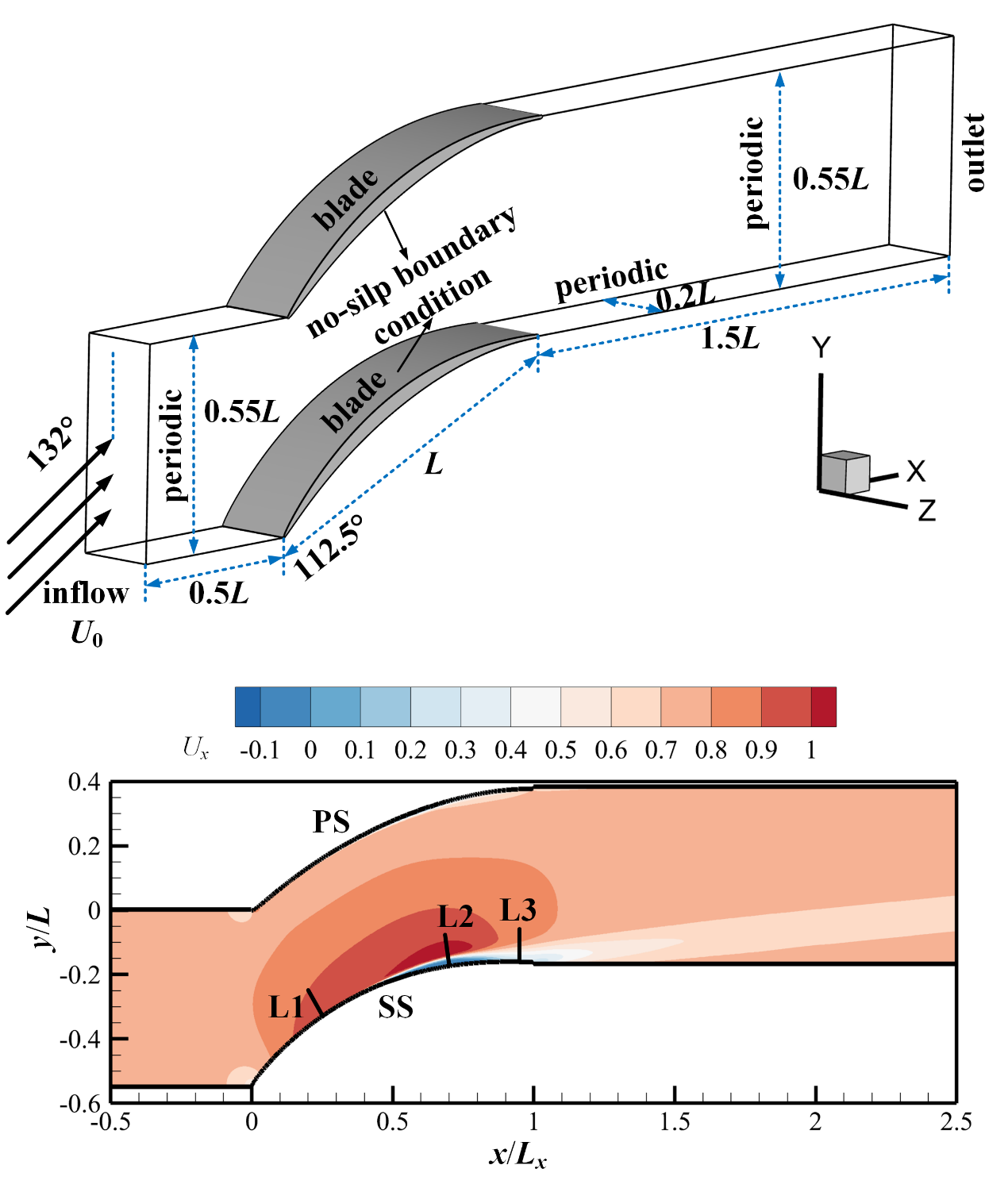
10、徐弘一研究员团队Aerospace Science and Technology, AST:基于叶片通道内直接数值模拟大数据的湍流封闭模型和雷诺平均求解
近日,我院徐弘一研究员团队在航空发动机工程数值仿真领域,基于热湍流DNS数据库取得重要进展,文章以 “基于叶片通道内直接数值模拟大数据的湍流封闭模型和雷诺平均求解”为题目,针对流体力学(Fluid Mechanics)和计算流体(Computational Fluid Dynamics)领域长期存在的湍流封闭模型构建和雷诺平均求解难题及其工程挑战开展了系统性研究。创新性地提出采用直接数值模拟统计大数据构建可靠湍流封闭模型,以此完成工程所亟需的雷诺平均方程求解,实现航发叶片通道内复杂湍流的高效模拟和预测目标。文章为有效且精准地预测湍流平均流场,给出了可快速工程落地的解决方案,即基于现代热湍流仿真统计大数据完成对雷诺平均方程的精准快速求解,为基于流体科学大数据支撑现代工程科学研发提供了前沿的实践与参考。
论文第一作者为博士研究生马崇宾,通讯作者为徐弘一研究员,合作者包括海仿公司高级研发工程师王铎和博士生刘洋。
原文链接:https://doi.org/10.1016/j.ast.2026.111799
11、徐弘一研究员团队ASME Journal of Turbomachinery, JoT:航发压气机叶片通道内多雷诺数直接数值模拟研究与流动边界层分析
近期,我院徐弘一研究员团队在航空推进工程领域获得重要进展。文章以“航发压气机叶片通道内多雷诺数直接数值模拟研究与流动边界层分析”为题目,详细阐述和展示复旦航空航天湍流研究组历经十余年打造并初具规模(接近PB级大数据规模)的航发叶片通道湍流直接数值模拟(DNS)计算平台和相关数据库,发表在美国机械工程师学会旗下《旋转叶轮机械》杂志。研究将湍流前沿DNS技术拓展至航空发动机复杂流动构型,突破了传统DNS只能在简单几何湍流中得以实现的瓶颈,不仅为湍流基础研究提供了具备工程应用价值的支撑,也为航空推进工程领域提供了可完整描述叶片热湍流流动细节的科学数据,是航发推进领域热湍流研究的一项重要成果,也为系统构建航发叶片通道湍流传热高保真精准科学大数据奠定了扎实基础。
论文第一作者为博士研究生刘洋,通讯作者为我院徐弘一研究员,合作者包括复旦博士研究生周雷、张祥、海仿公司高级研发工程师王铎、加拿大多伦多大学数学系本科生陈晓岚和中航商发研究员邵卫东。
原文链接:https://doi.org/10.1115/1.4070225






