
 搜索
搜索

初冬时节,成果上新!
智能机器人与先进制造创新学院科技工作者
持续深耕前沿
小编汇总了 11 月部分进展
邀您共品创新硕果
1.孙刚课题组Aerospace Science and Technology:流场结构数据导向下的压气机叶片气动弹性问题的设计方法
近期,我院孙刚教授课题组团队提出了基于流场特性数据导向方法的压气机叶片的气动弹性设计优化方法,研究了利用非定常情形下的叶片周遭的流场数据来辅助改善叶片所受的非定常载荷,从而提高叶片的气动弹性阻尼的问题,相关成果以“Flow structure coupling LSTM-MOGA method in the unsteady aeroelastic optimization design of the compressor blade of the civil aircraft engine”为题目发表在Aerospace Science and Technology上。
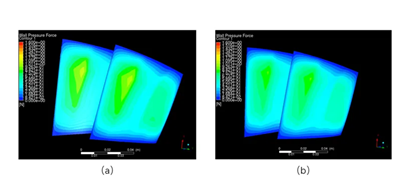
孙刚教授团队研究人员提出利用一种流场结构数据导向与数据驱动下的气动弹性问题的设计方法。考虑了跨音速情形下叶片表面的激波结构对叶片的非定常力作用,通过改善叶片在非定常周期下所受的非定常功,达到提高叶片气动阻尼值的效果。该方法利用仿真方法建立数据库,利用LSTM网络建立周期数据下激波的位置、波前压力的陡峭程度和波后的分离程度与叶片气动阻尼值之间的关系。经过分析,发现激波结构的相关参数与叶片的气动阻尼的数据之间有着明确的相关性,且当激波结构参数处于某一特定区间时,叶片的气动阻尼有着明显的改善。在此基础上,该文章把叶片的气动弹性设计问题转化为了一个流场结构设计问题,将后续设计目标变为改变叶片外形来获得一个理想的流场结构。之后,该研究通过遗传算法改变叶片外形来尽可能接近理想的流场结构,达到改善阻尼的效果。优化设计后的仿真实验结果表示,叶片在优化后表面收到的非定常力得到了抑制,周期振动下叶片所受功总体朝负功方向变化,叶片的气动弹性阻尼得到了提升。对比前后叶片表面激波的参数变化,对叶片稳定不利的波前压力的陡峭程度得到了明显缓和,优化后的激波结构符合设计前分析的预测。相比传统方法,该方法充分利用了仿真实验的数据,降低实验成本,简化了设计问题,同时提供了明确的理论支持。
该论文的第一作者为复旦大学航空航天系博士生王恺迪,孙刚教授为论文的通讯作者,硕士生周思历是论文的合作者。
文章链接:
https://www.sciencedirect.com/science/article/abs/pii/S1270963825009101?via%3Dihub
2.陈文明课题组IEEE TIM:基于深度学习的多维力解耦技术基准测试模型
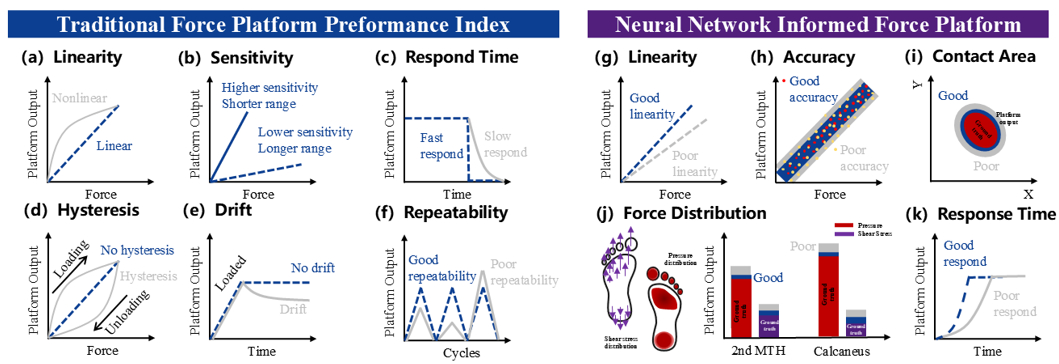
近日,复旦大学智能机器人与先进制造创新学院/可信具身智能研究院的陈文明课题组在多维力传感技术领域取得新进展。该研究创新性地将基于AI的多维力解耦技术,成功应用于步态动力学检测平台。研究建立了基于深度学习方法的基准测试模型,提出了多个评价指标来全面评估多维力解耦技术的性能,为行业内后续研究提供标准化的对比测试模型。相关工作以“A Quantitative Benchmark of Deep Learning-Based Decoupling Methods for Multidimensional Force Platform Used in Dynamic Gait Analysis”为题,发表于仪器仪表与测量领域权威期刊《IEEE Transactions on Instrumentation and Measurement》(IEEE TIM)。目前,基于AI的多维力解耦技术应用一直缺乏统一的、区别与传统力学检测平台的性能指标。基于该团队之前开发的视触觉驱动的多维分布力检测平台及深度学习驱动的多维力解耦算法,建立了力准确度、线性度,接触面积、分布力大小及响应时间等多种评价指标及最新的评估结果。该研究为基于AI的多维分布力检测平台开发及其在医疗康复、机器人工业领域的应用奠定了坚实的理论基础与评测基准。
本文第一作者为复旦大学可信具身智能研究院博士生罗虎,通讯作者为可信具身智能研究院陈文明研究员。研究得到国家自然科学基金面上项目、上海通用人工智能基础研究项目等资助。
论文作者:罗虎,许阳阳,黄邱荟,王晓晖,王泽圣,喻健,朱云超,马昕,陈文明
文章链接:
https://ieeexplore.ieee.org/document/11250718
3.张壮青年研究员IEEE TRO:仿生跨介质两栖机器人
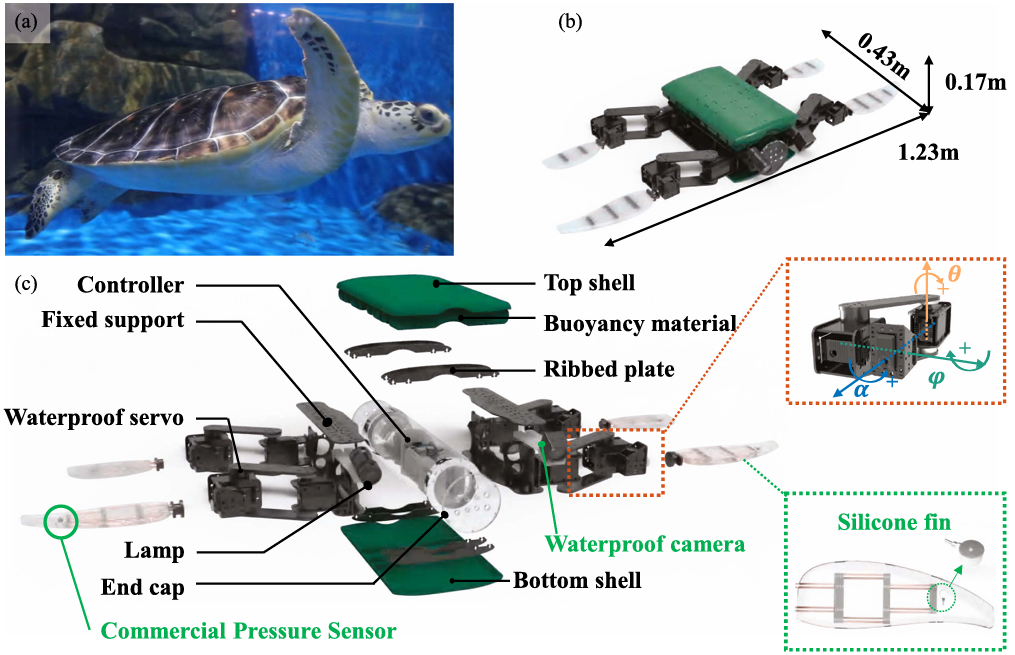
近日,我院青年研究员张壮与清华大学深圳国际研究生院曲钧天副教授团队合作,研发智能仿生两栖海龟机器人(IBATR),在复杂水陆环境自适应运动领域取得突破,其感知-驱动一体化设计为海洋探测、环境监测等领域提供了新型技术方案,相关成果发表于IEEE Transactions on Robotics,张壮为论文共同通讯作者。
该机器人采用三自由度仿生鳍肢与轻量化碳纤维结构,搭载视觉摄像头、压力传感器及九轴IMU,构建双模态卷积神经网络地形分类框架,实现99.17%的地形识别准确率。团队创新提出融合BP神经网络、动力学仿真与贝叶斯优化的协同设计策略,生成四类最优步态,使运动效率提升19.1%、速度提高9.2%。通过改进DH方法与多体耦合动力学建模,机器人在波浪扰动下实现水陆无缝过渡,轨迹跟踪横向误差控制在0.21m内。野外环境测试验证了其在异质基底的稳定运行能力,实现了水陆环境下的动态步态自适应切换,突破单一感知模式局限,为复杂两栖场景探测与应急响应提供了关键技术支撑。
文章链接:
https://doi.org/10.1109/TRO.2025.3626512
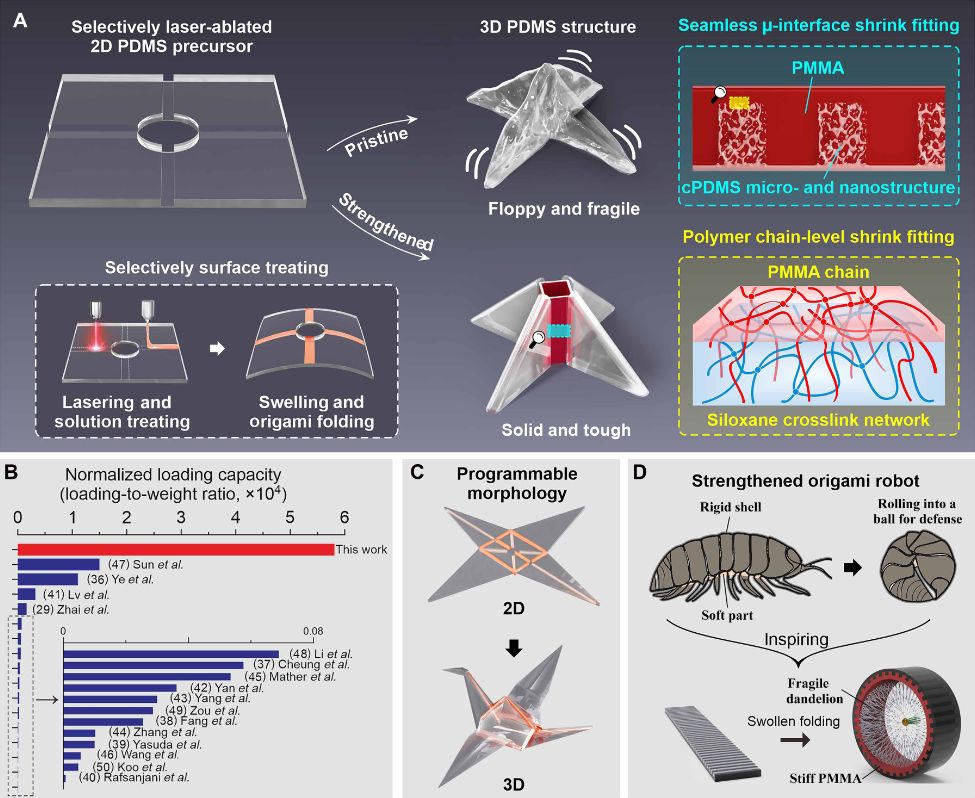
4.张壮青年研究员Science Advances:机械强化硅基折纸结构
近日,我院青年研究员张壮与华中科技大学厉侃、吴志刚教授团队合作,在折纸结构可编程设计与机械增强领域取得关键进展,为软材料在建筑设计、超材料研发及机器人构建等领域的应用提供了创新路径,相关成果发表于Science Advances,张壮为论文共同通讯作者。
该研究针对PDMS弹性体微米厚度结构机械支撑不足、现有改性技术存在界面不匹配或影响本征性能等痛点,团队提出PMMA/丙酮溶液膨胀增强策略:平面前驱体经溶剂扩散膨胀折叠为折纸状结构,PMMA链与PDMS硅氧网络形成链级紧配合,同时填充激光诱导微纳米间隙,构建无缝界面。该方案使折纸结构机械强度(负载-重量比)突破58100倍,远超以往报道。这项技术成功实现微米厚PDMS的可编程空间构建,团队据此研发出仿蜱式环形机器人,其坚固PMMA外壳可适配高负荷、抗冲击场景及生物启发功能结构,为软材料与结构工程的持续发展提供了关键技术支撑。
https://doi.org/10.1126/sciadv.adz8940
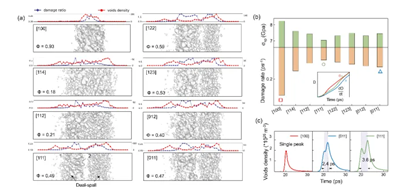
5.童崎课题组Advanced Science:单晶材料在冲击下的“双层裂”新现象
近日,我院童崎教授与武汉理工大学沈强教授团队合作,以单晶铝为例,采用大规模分子动力学结合数值模型模拟其破坏过程,发现由弹塑性波分离各向异性导致的“双层裂”新现象,相关成果以“Wave-Partition-Governed Dual-Site Spallation in Single Crystals”为题发表在Advanced Science上,该成果揭示了冲击加载下完美晶体减缓损伤累积的重要机理,为应力波调制和冲击防护提供了新的思路。

非平衡分子动力学模拟结合分切应力计算结果表明,不同取向下单晶切应力释放能力的差异导致压缩应力波传播呈现两种模式,以[100]的单塑性波和[111],[110]取向下的弹性前驱波-塑性波双波模式。弹性波(e波)与塑性波(p波)的分离随着应力波的传播而加剧,经由自由表面反射后与加载端的卸载稀疏波交汇,会使得材料内部发生拉伸层裂。不同于[100]取向样本中损伤集中一处,[100]和[111]方向中,由于弹塑性波的彻底分离,弹性前体波经历了一个应力松弛过程,因而在系统的拉伸阶段,冲击端释放的稀疏波将依次与两个相对独立的反射波相交。这使得体系左右两部分分别经历独立的成核过程,即发生“双层裂”。图a中展示了8个典型FCC取向中层裂模式由单点向双点模式的过渡,相较于单点模式,双层裂中的孔洞聚合程度大幅下降 (序参量Φ<0.5)。此外,观察到双层裂的损伤速率明显得到减缓(图b),且层裂强度更大的取向表现出了更快的损伤累积速率。进一步采用改进的成核-生长(MNAG)模型结合遗传算法拟合了单、双点层裂的损伤度演化曲线,获得良好的效果。其拟合参数连同通过Grady模型计算的有效破坏表面能,共同验证了双层裂这一新现象有更为优异的层裂抗性。该现象的发现对于极端条件服役的精细结构材料设计具有重要意义。
论文第一作者为博士后祝有麟,通讯作者为我院童崎教授和武汉理工大学沈强教授。研究得到国家自然科学基金、科技部重点研发计划等项目的资助。
文章链接:
https://advanced.onlinelibrary.wiley.com/doi/10.1002/advs.202515623






