
 搜索
搜索

近日,智能机器人与先进制造创新学院丁晨阳团队在《Engineering Applications of Artificial Intelligence》(中科院1区Top)上发表研究成果:Model-based pre-compensator design for piezoelectric actuators based on physics guided neural network and physics-precision balanced training。复旦大学智能机器人与先进制造创新学院为通讯单位,专任助理研究员李钦为第一作者。该工作得到了国家重点研发计划课题的资助。
研究内容
本研究针对精密运动系统中的建模、辨识与控制问题展开。在精密运动控制系统中,高精度模型的建立对于动力学分析、控制器设计具有重要意义。然而,随着模型精度要求的不断提高,各类复杂非线性因素的影响逐渐显著,为进一步提升模型精度和控制性能带来了挑战。
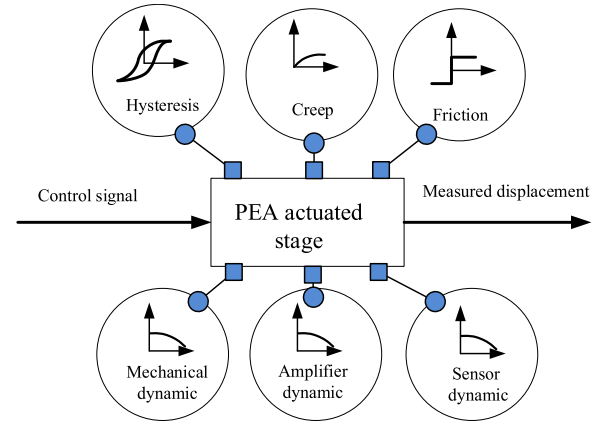
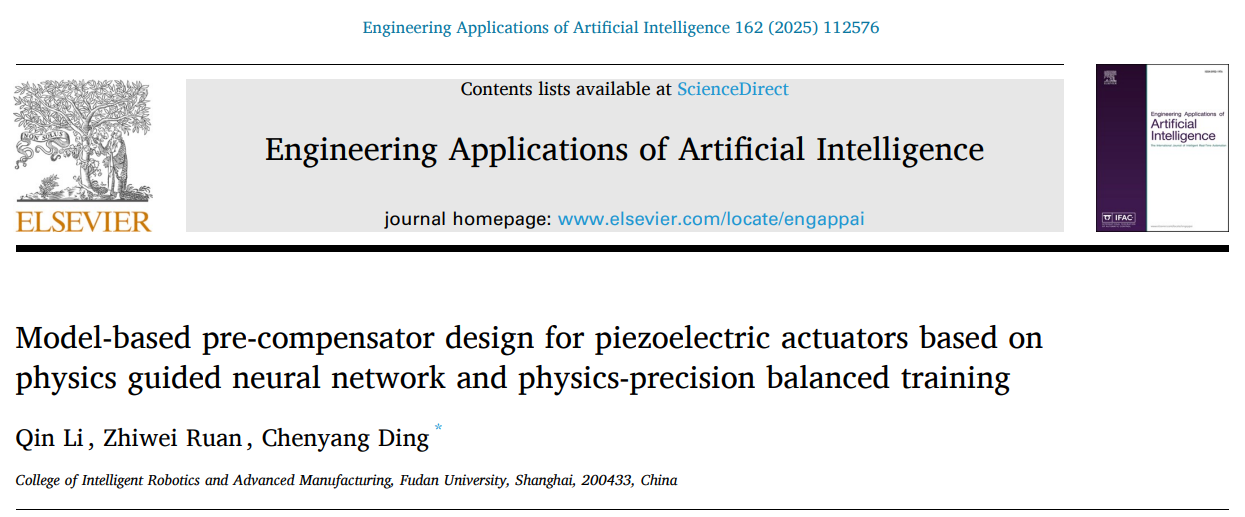
图1:压电致动器的复杂非线性因素
针对包含多种非线性因素的复杂系统建模问题,现有研究主要采用物理建模和数据驱动建模两类方法。物理建模能够反映系统的内在机理特征,模型行为稳定,不易对系统闭环性能造成不良影响。然而,其结构复杂、建模过程繁琐,且在多输入多输出系统(MIMO)或耦合关系显著的系统中,参数辨识较为困难。相比之下,数据驱动建模过程简洁、模型结构简单,但往往缺乏物理可解释性,泛化能力有限,且稳定性难以严格保证。针对该问题,物理模型与数据驱动相结合的方法被提出。其中,物理模型引导的神经网络(Physics Guided Neural Network, PGNN),通过引入具有明确物理意义的结构,引导神经网络的输出,在提升模型可解释性的同时增强其稳定性,具有良好的应用潜力。
图2:PGNN中物理模型与数据驱动模型的关系(a)物理引导输出;(b)物理引导辨识
尽管理论上PGNN具有良好的性能,但其在参数训练过程中面的挑战阻碍了其在工程实际中的应用。由于物理模型与神经网络在训练过程中的竞争关系,PGNN容易出现过拟合问题。神经网络的强拟合能力往往使其在训练中占据主导地位,从而损害物理模型的正确性,并导致整体精度下降。现有的同步辨识、顺序辨识和约束辨识等方法仍难以有效解决这一问题。
为此,本研究提出了一种模型精确性—物理正确性均衡(Physics–Precision Balanced Training, PPBT)训练方法。该方法首先在数学上定义了PGNN的模型精确性与物理正确性表述,而后通过构造非线性目标函数以平衡二者在训练过程中的竞争关系。最终,实现在保证模型高精度的同时保持其物理正确性,实现建模精度与性能鲁棒性的协同提升。
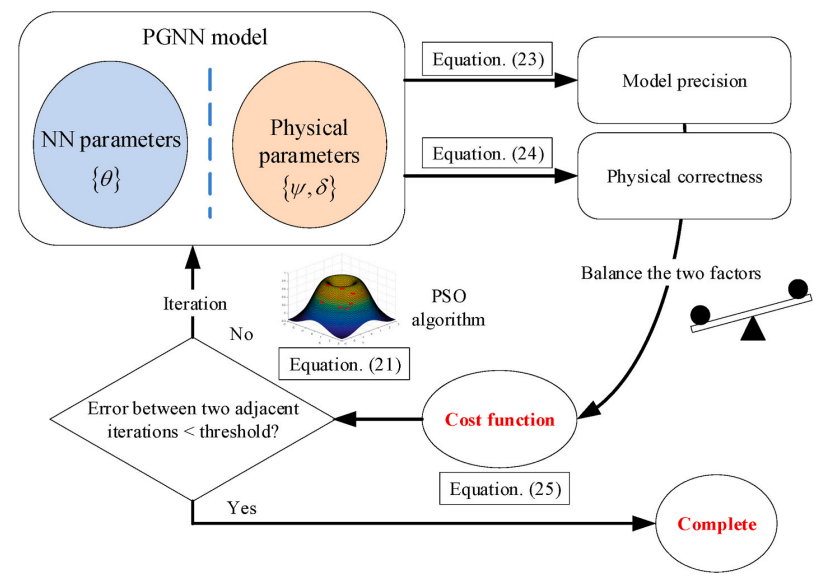
图3:模型精确性-物理正确性均衡的训练方法(PPBT)
实验效果
针对广泛应用于精密运动控制领域的压电致动器运动台,本研究进行了实验验证工作。本研究首先构建了压电致动器的PGNN结构,并基于所提PPBT方法完成模型训练。随后建立其逆模型作为前馈补偿器,以实现高精度运动控制。实验采用任意A点至B点的三阶轨迹进行精度测试,以评估PGNN在前馈补偿中的性能。
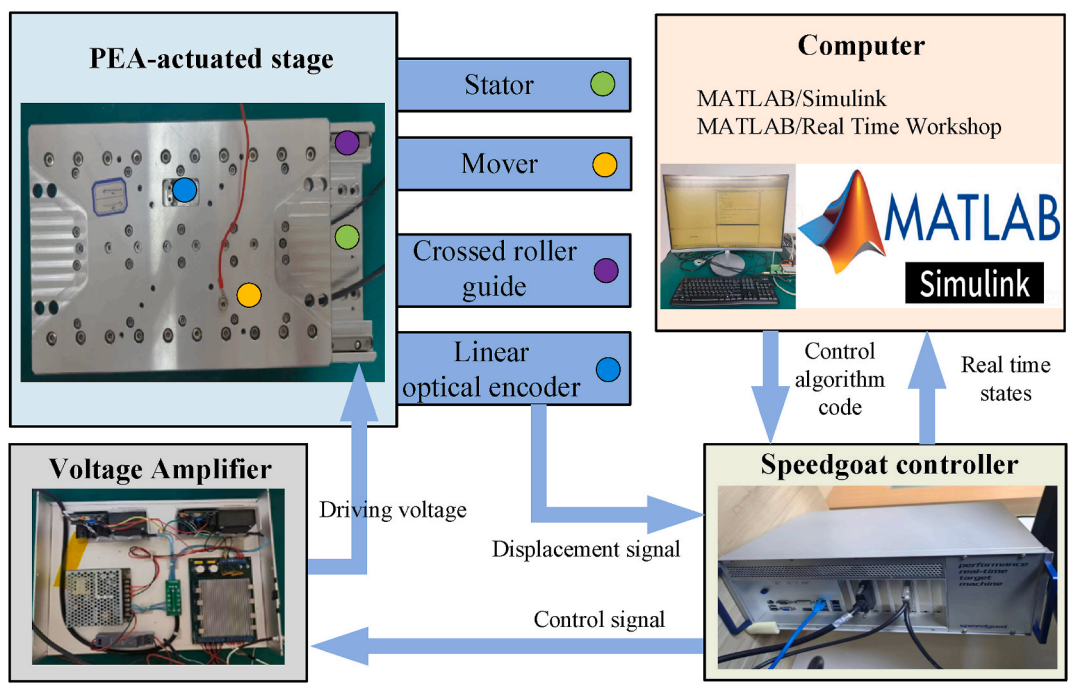
图4:PGNN前馈补偿方法在压电制动器上进行实验验证
实验结果表明,基于PGNN与PPBT的前馈补偿器实现了35 nm以内的位移误差峰–峰值,性能显著优于传统PI算子补偿方法和纯数据驱动的神经网络方法。在多轨迹测试中,所提方法展现出良好的泛化能力。总体而言,基于PGNN与PPBT的方法相较于物理模型方法具有更高的建模精度,而相较于纯神经网络方法表现出更强的泛化能力。该方法结合了物理模型与数据驱动模型的优势,实验结果验证了其在精密运动控制中的工程应用价值。
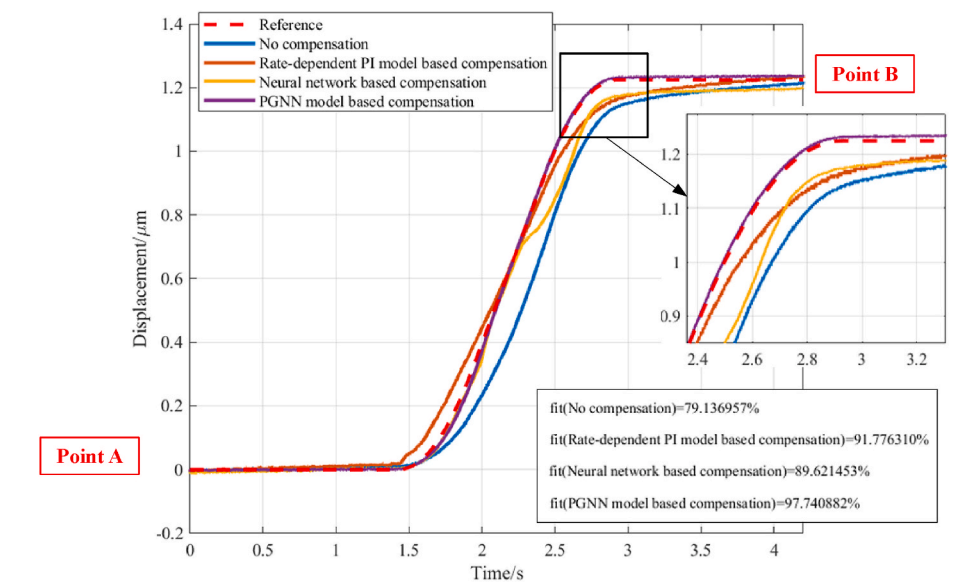
图5:压电致动器运动台的位移
延申阅读
由丁晨阳研究员创立的精密装备动力学与控制实验室,隶属于复旦大学智能机器人与先进制造创新学院,主要从事精密运动控制方法、动力学分析、物理与数据驱动结合控制方法、人工智能建模与控制方法的研究工作。相关成果发表于MSSP、ISA-T、EAAI、CEP、TM、ND、SMS、PE等期刊。






