
 搜索
搜索

近日,智能机器人与先进制造创新学院智柔体设计与制造实验室徐凡教授团队创制了一种可视化可编程拟液晶超结构,通过宏观尺度可视化编程实现了对序构多畴材料独特力学行为的精确模拟与智能调控。研究成果《Programmable mechanical metastructures modeling polydomain materials》发表于国际一流学术期刊Science Advances (2025, 11, eadz9811)。智能机器人与先进制造创新学院助理教授杨易凡、博士生张晓亮为论文共同第一作者,徐凡教授为通讯作者,合作者包括博士生林昕琦、同济大学助理教授汪婷。研究得到国家杰出青年科学基金、上海市基础研究特区计划、上海市教委等资助。
论文简介
多畴材料在磁性薄膜、液晶弹性体等体系中广泛存在,其微观基元取向与畴分布对材料宏观性能具有重要影响。然而,由于微观液晶分子与高分子链的耦合关系极为复杂,传统方法难以实现分子尺度的直观观测与精准调控,限制了对多畴材料变形机制的深入理解。是否以及如何在宏观尺度实现微观拓扑变形机制的可视化设计,并建立序构取向与畴分布的宏观可编程设计方法,对活性序构材料的功能设计与智能调控具有重要意义。
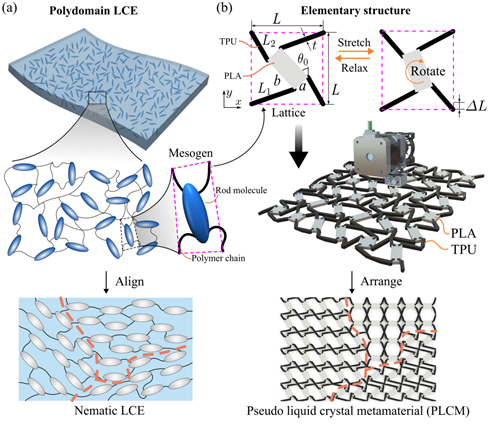
图1. 液晶弹性体网络结构与拟液晶超材料多畴序构可视化编程设计与构筑
研究人员采用硬质聚乳酸(PLA)与柔性热塑性聚氨酯(TPU),通过引入手性参数并结合3D打印技术,构筑了宏观尺度的拟液晶超材料(PLCM),实现了液晶弹性体微结构多畴序构的可视化编程(图1)。
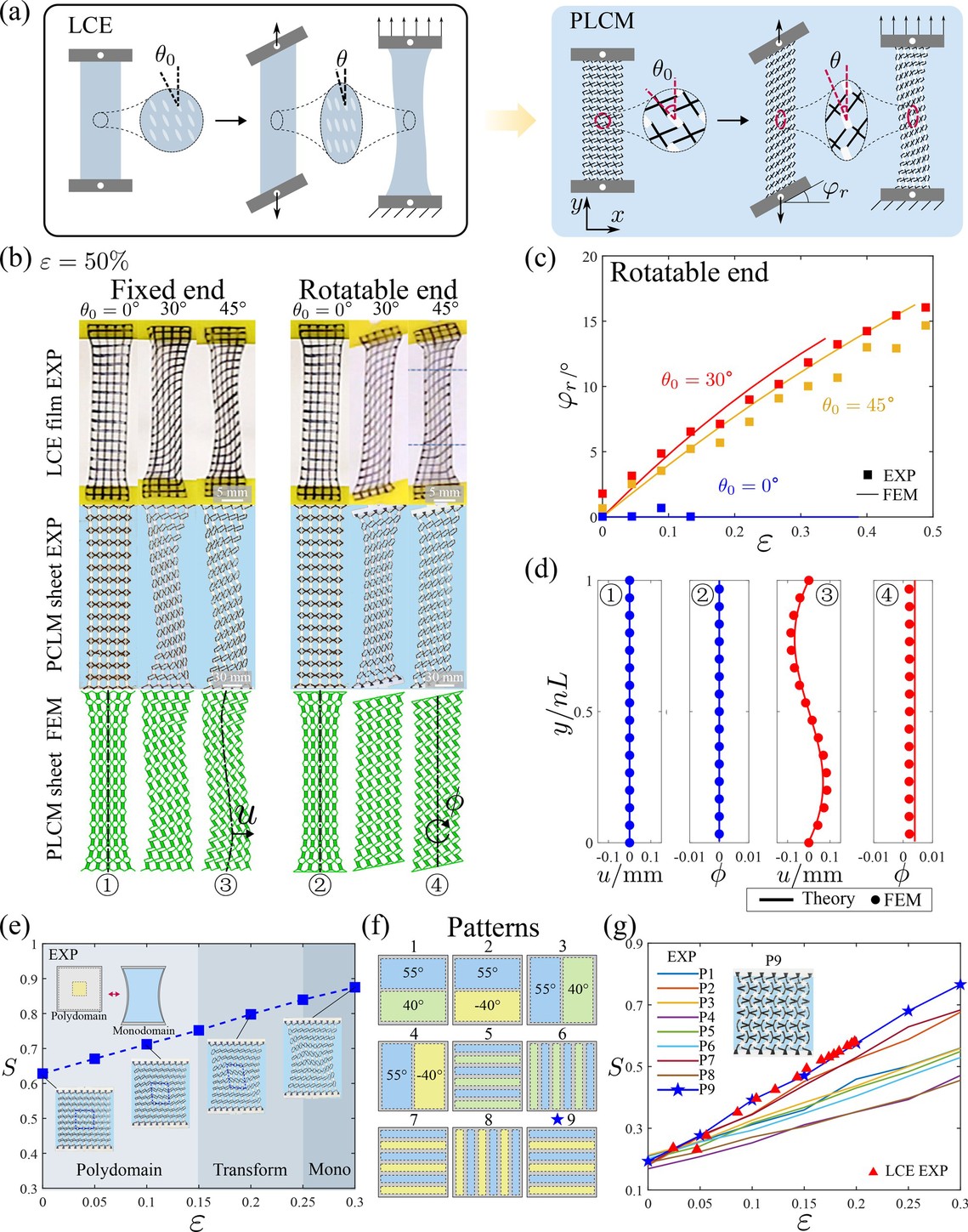
图2. 拟液晶超材料(PLCM)薄膜单轴拉伸和多畴-单畴(P-M)相变
该超材料能够精确再现真实液晶弹性体在单轴拉伸下的非均匀变形特征(图2)。实验观察到PLCM薄膜在固支边界下呈现S形剪切变形,而在可转动边界条件下则随边界旋转来释放剪应力。研究人员建立了基于微极理论的均质化模型,将胞元刚性块的旋转角度作为独立变量表征材料手性特征,理论预测与实验结果高度吻合。此外,该超材料还展现出明显的多畴-单畴相变行为,材料有序度随拉伸应变增加逐渐趋近1,再现了真实液晶弹性体的畴演化进程。
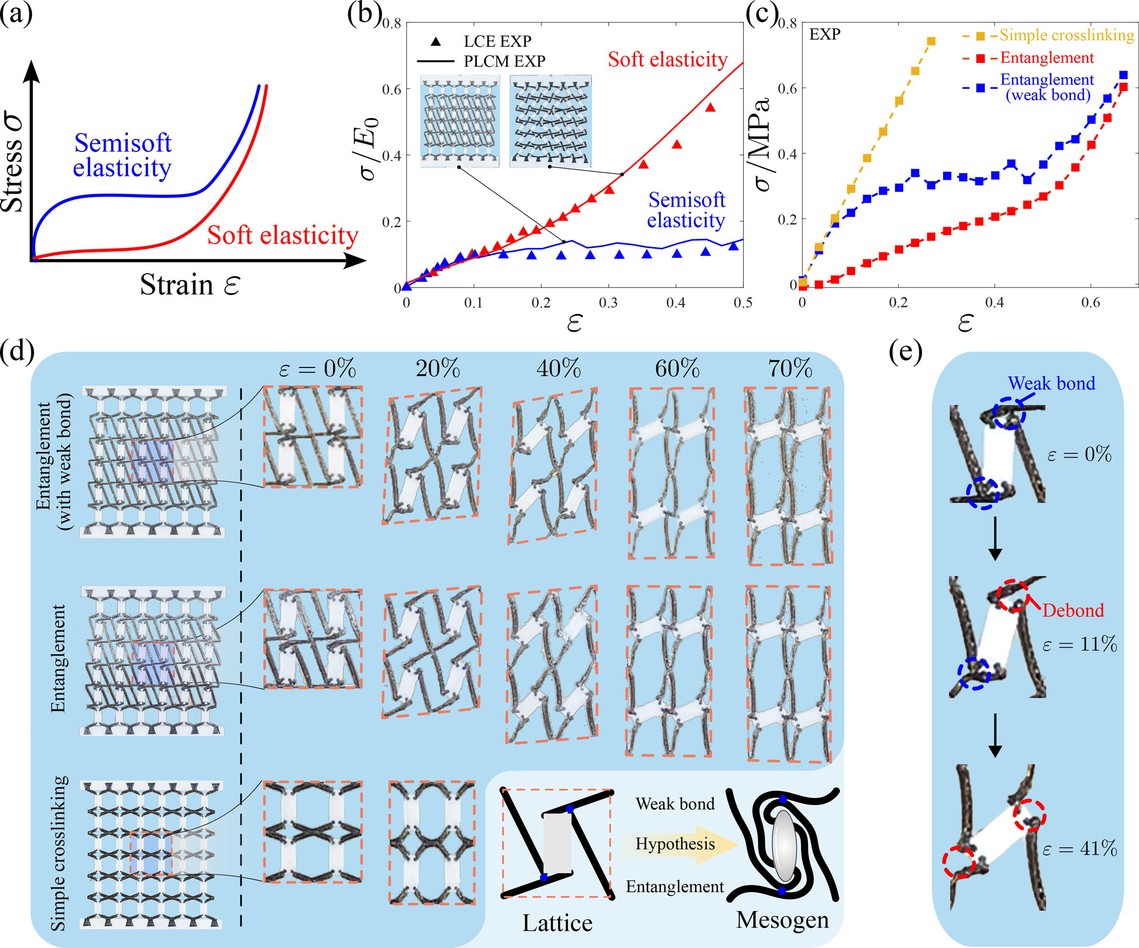
图3. 拟液晶超材料(PLCM)再现真实LCE的软/半软弹性响应
研究人员进一步通过调控胞元间的交联拓扑结构,实现了对材料应力-应变响应的灵活编程(图3)。通过设计简单交联单元和缠结交联单元等不同拓扑构形,成功模拟了真实液晶弹性体的软弹性和半软弹性“平台”特性。研究发现软梁的脱粘现象是产生应力平台的关键机制,揭示了真实液晶弹性体半软弹性响应可能源于分子网络不完全交联导致的弱键约束。
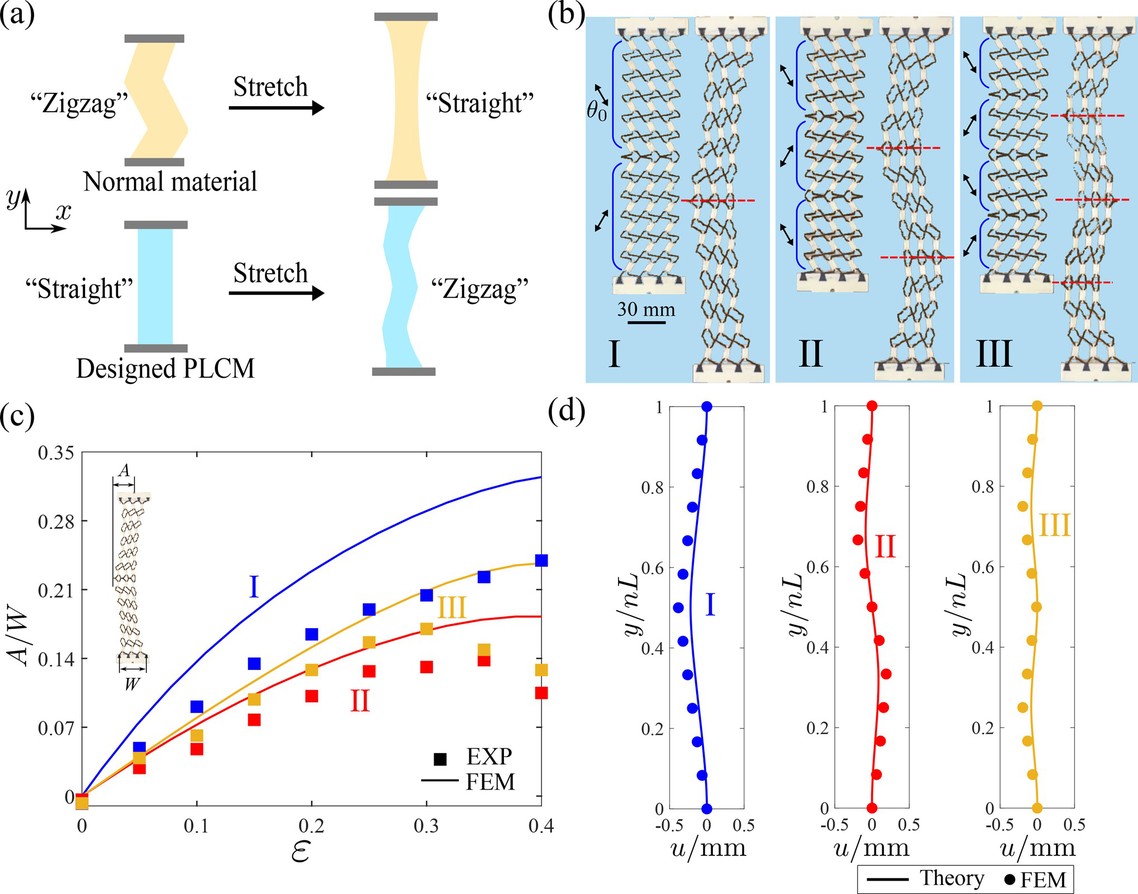
图4. 多畴超材料反常Zigzag拉伸-弯曲变形
拟液晶超材料可实现多种复杂功能的可编程宏观设计。通过精心设计畴的排布取向,实现了受拉伸时的反常Zigzag弯折变形,突破了材料“受拉变直”的经典变形规律(图4)。
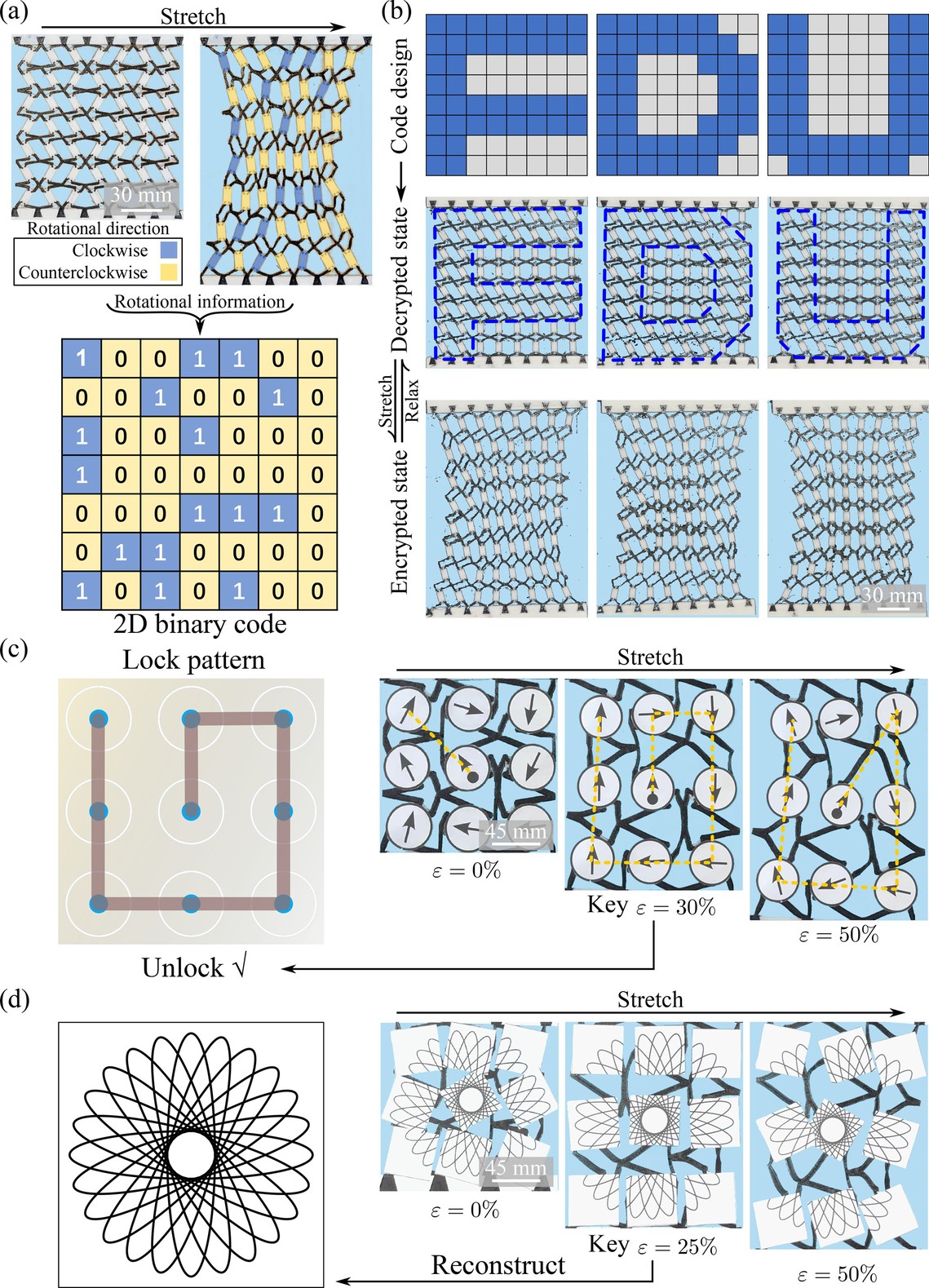
图5. 多畴超材料可视化信息编码设计
研究人员还开发了应变触发的信息编码与解码功能,基于胞元刚性体旋转方向的二进制编码实现视觉图案加密,设计了九宫格应变解码器以及应变触发的图像信息重构功能(图5)。
研究成果为理解多畴材料在分子尺度微结构拓扑变形机制提供了宏观可视化途径,也为多畴功能材料的序构制备与可编程设计开辟了新思路。
延伸阅读
智柔体设计与制造实验室关于手性拓扑形貌形成与演化力学机制、智柔体设计与构筑的研究工作近年来取得了显著进展:发现旱生植物叶片的手性扭转生长形貌在水分收集与抗风性能中的双效机制,构建了活性叶片生长力学理论模型,创制了具有环境智适应特性的仿生具身智能植株(Nat. Comput. Sci., 2025, 5, 313-321;Nat. Comput. Sci., 2025, 5, 275-276);发现曲面手性褶皱拓扑形貌,建立了变曲率非线性核壳力学模型(Phys. Rev. Lett., 2023, 130, 048201),创制了基于曲面手性拓扑失稳形貌的目标自适应智能软抓手(Nat. Comput. Sci., 2022, 2, 632-640)。
原文链接
https://doi.org/10.1126/sciadv.adz9811
相关延伸链接
https://doi.org/10.1038/s43588-025-00786-w
https://doi.org/10.1038/s43588-025-00801-0
https://doi.org/10.1038/s43588-022-00332-y
https://doi.org/10.1103/PhysRevLett.130.048201






