
 搜索
搜索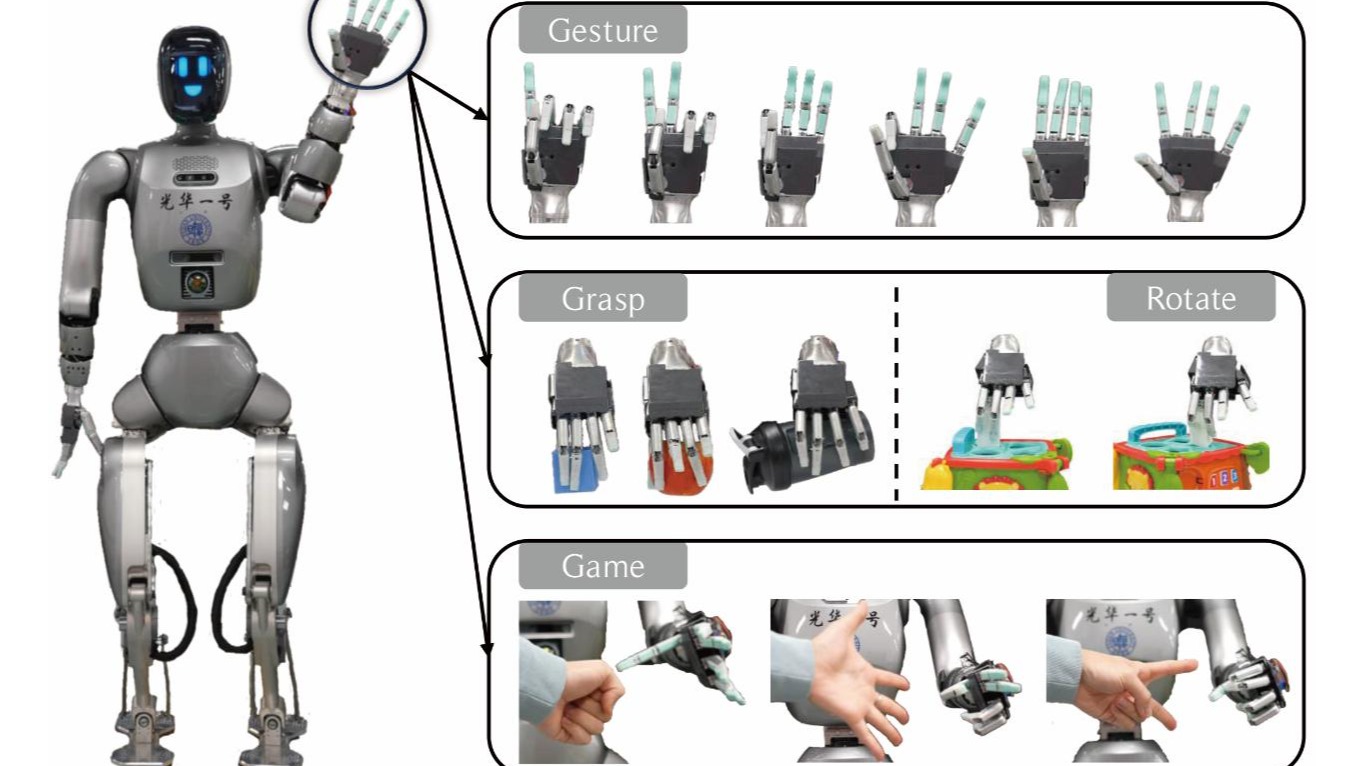

近日,智能机器人与先进制造创新学院集群机器人系统实验室(Multi-Agent Robotic Systems Lab,简称:Magic Lab)在机器人领域权威期刊IEEE Robotics and Automation Letters上发表研究成果《The Folding Hand: Anthropomorphic Robotic Hands with a Compact Reconfigurable Humanoid Palm Design》。博士后卢秋洁、硕士邹杰晗为论文共同第一作者,甘中学教授为通讯作者。该研究是甘中学教授主持上海市人工智能重大专项的一大技术突破,围绕人机物协同与智能融合的核心科学问题,突破了传统机器人手设计的技术瓶颈。
论文简介
仿人机器人手是实现灵巧操作的关键器件,然而传统设计往往面临成本高昂、控制复杂、硬件冗余等挑战。现有的仿人机器人手要么追求高自由度但结构复杂,要么简化设计但牺牲拟人性能。针对这一技术难题,本研究提出了一种创新的"扇形手"(Folding Hand)设计方案。
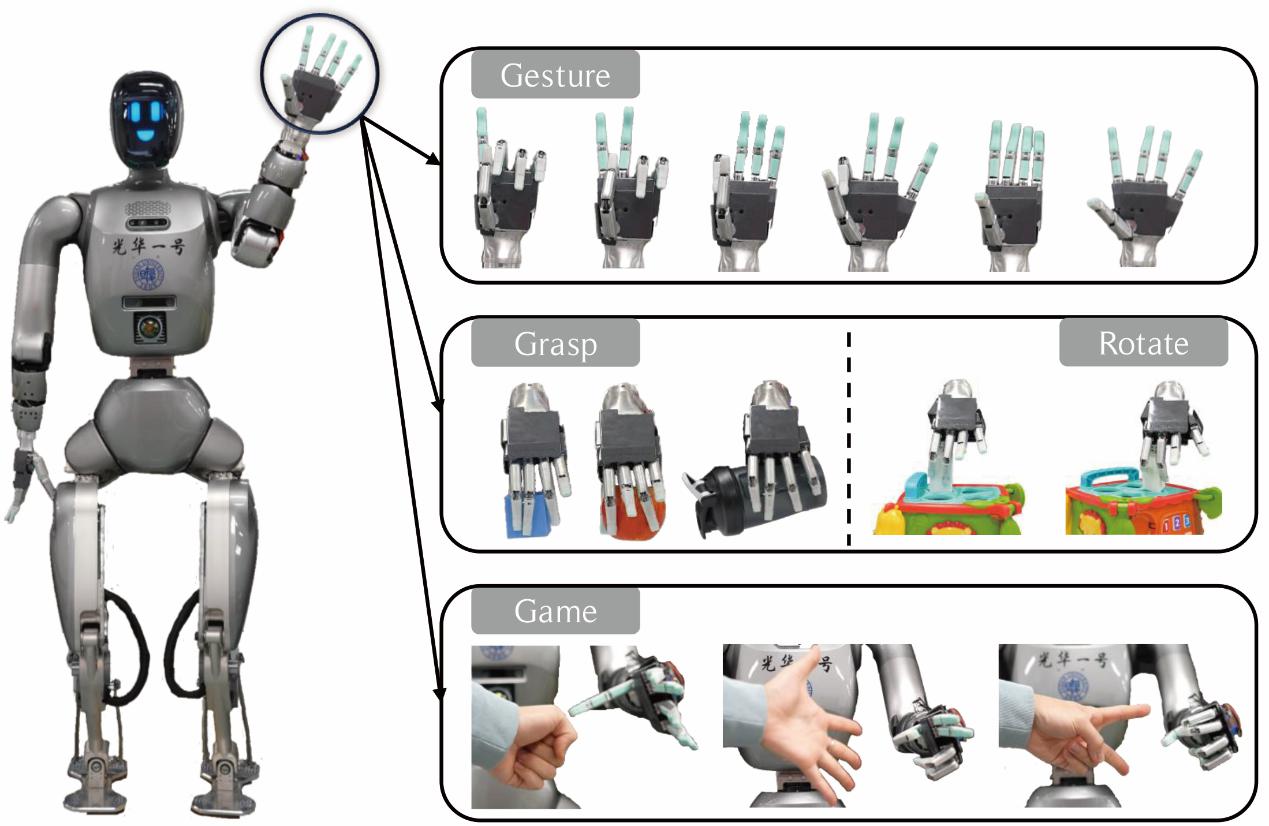
图1、基本功能展示
扇形手采用独特的扇形折叠机制,仅用一个驱动器就能实现手掌的内收和外展运动,模拟人手掌骨关节的复杂运动模式。这种创新设计在保持完整五指仿人形态的同时,显著降低了硬件复杂度和制造成本。图一展示了扇形手在光华一号上的部署,其具有更拟人化的功能。
设计创新亮点:
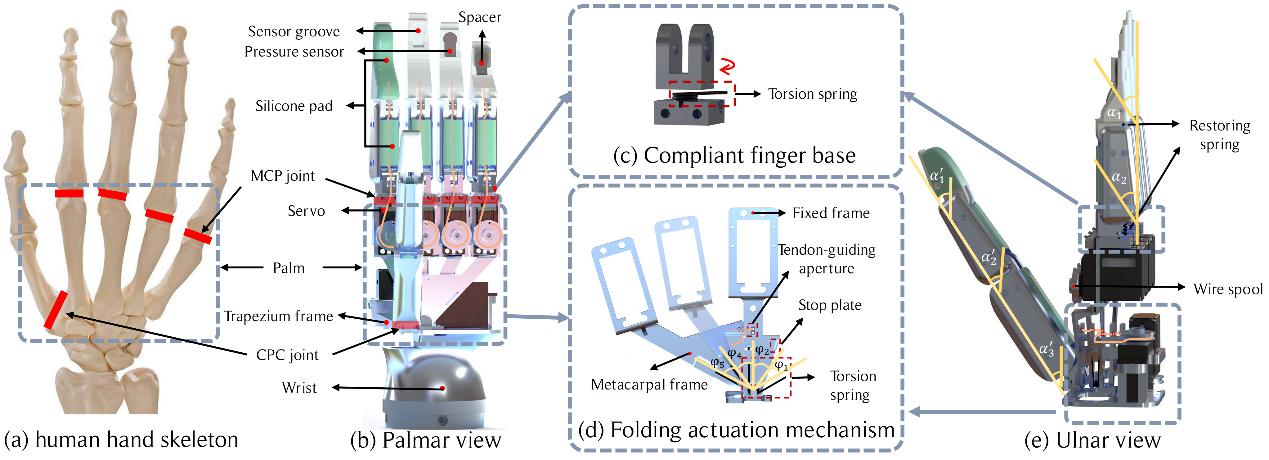
图2 、整手设计与驱动
1. 紧凑型可重构手掌设计 核心创新在于扇形折叠机制,仅用一个驱动器就能协调控制所有手指基部的内收外展运动,完美复现人手掌骨关节的生物力学特性。相比传统需要多个驱动器的方案,实现了显著的结构简化。
2. 超高性价比技术方案 整个机器人手仅使用6个驱动器和5个传感器,总成本控制在180美元以内,相比同类产品成本降低了70%以上。
3. 自适应柔顺基座设计 每个手指根部配备自适应旋转基座,通过扭转弹簧提供被动适应能力。这种设计使手指能够自动适应物体几何形状,提升抓取的稳定性和适应性,实现了硬件简化与功能增强的统一。
实验验证与性能评估
研究团队提出了一套与物体无关的综合抓握能力评估体系。该方法突破了传统评估依赖预定义物体的局限,通过结合抓取质量和抓取工作空间分析,为机器人手设计提供了科学统一的性能评估标准。理论数据显示,"扇形手"的性能提升显著:有效抓握覆盖率提升99.9%,抓握质量指标提升29.5%,体积测度指标提升86.1%。抓取实验表明,扇形手在多种物体抓取任务中表现显著优于传统固定手掌设计。特别是在处理不规则形状物体时,扇形折叠机制能够有效增加接触面积,提升抓取稳定性。手内操作实验中采用混合控制策略进一步展示了该手的精细手内操作能力,展示了其潜在的功能性。与其它知名产品相比,扇形手实现了轻量化与完整仿人功能的平衡。
延伸阅读
《IEEE Robotics and Automation Letters》为机器人与自动化领域的权威期刊,该刊专注于发表机器人学、自动化和相关领域的高质量原创研究成果。期刊涵盖机器人设计与控制、智能感知与规划、人机交互、生物机器人等前沿方向,在国际机器人学术界享有盛誉。
Magic Lab作为智能机器人与先进制造创新学院的核心研究团队,在甘中学院长的带领下,聚焦群体智能理论与关键技术,致力于突破人机物协同与智能融合的科学难题。本次扇形手技术成果的发表,标志着团队在仿人机器人关键技术方面取得了重要突破,为构建智慧交通与智能制造场景下的异构集群交互系统提供了重要技术支撑。






