
 搜索
搜索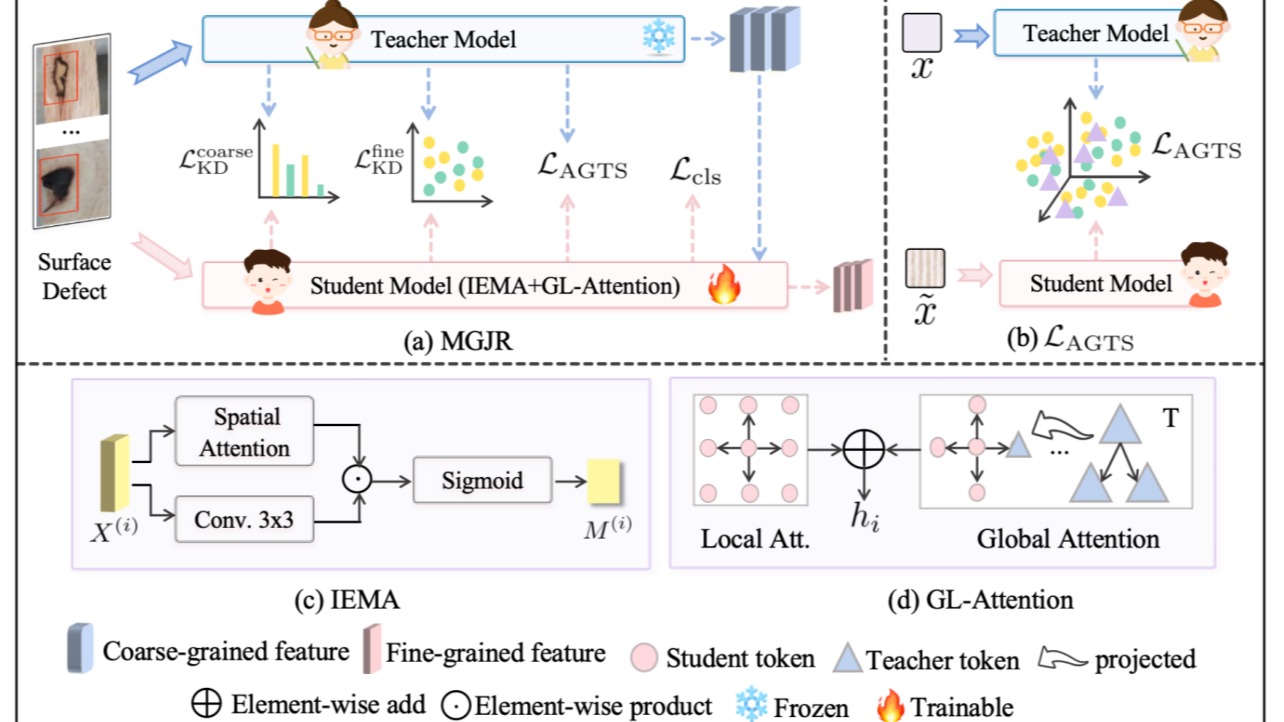

近日,智能机器人与先进制造创新学院甘中学教授课题组集群机器人系统实验室(Multi-AGent robotIC systems Lab,简称MAGIC Lab)在计算机科学领域的国际权威期刊Journal of Industrial Information Integration(简称JIII,中科院一区TOP期刊)上发表工业环境中表面缺陷检测领域的最新研究成果《Multi-Grained Teacher-Student Joint Representation Learning for Surface Defect Classification》。2023级博士生孟春雷为第一作者,青年副研究员欧阳春、甘中学教授为通讯作者。
论文简介
表面缺陷分类 (SDC) 在工业制造中对于确保产品质量至关重要。实践中,由于划痕、污点和凹痕等缺陷的尺寸、形状和纹理差异很大,并且这些缺陷出现在高度复杂和嘈杂的环境中,因此缺陷分类面临着巨大的挑战。这些动态且复杂的条件使得提取可靠且具有判别力的特征变得困难,常常导致错误分类,包括误报和漏检。
现有方法面临三大挑战。首先,它们缺乏统一的多粒度特征表示,限制了对不同缺陷类型的同时识别。其次,简单的多尺度融合方法难以在不同缺陷尺度上实现精确的语义对齐。第三,对于现实世界的工业噪声,缺乏明确的鲁棒性约束。解决这些问题需要一个能够系统地统一全局和局部特征并明确增强鲁棒性的集成框架。
因此,本研究提出了一种多粒度师生联合表征学习 (MGJR) 框架,该框架将粗粒度和细粒度的表征学习集成在一个统一的架构中,如图1所示。基于 ViT 的教师网络首先从富含缺陷的背景中学习整体的全局特征。这些特征引导学生网络,并通过集成高效多注意力 (IEMA) 模块和全局-局部注意力 (GL-Attention) 机制进行增强,从而能够提取和融合多尺度特征,在保留上下文信息的同时突出局部异常。此外,锚引导训练策略 (AGTS) 充当了一致性约束,通过在噪声输入下将教师模型的稳定粗粒度信号与学生模型的细粒度响应对齐,增强了鲁棒性。整个框架使用统一的损失函数进行端到端优化,该损失函数将粗粒度指导与特定任务的监督相结合。
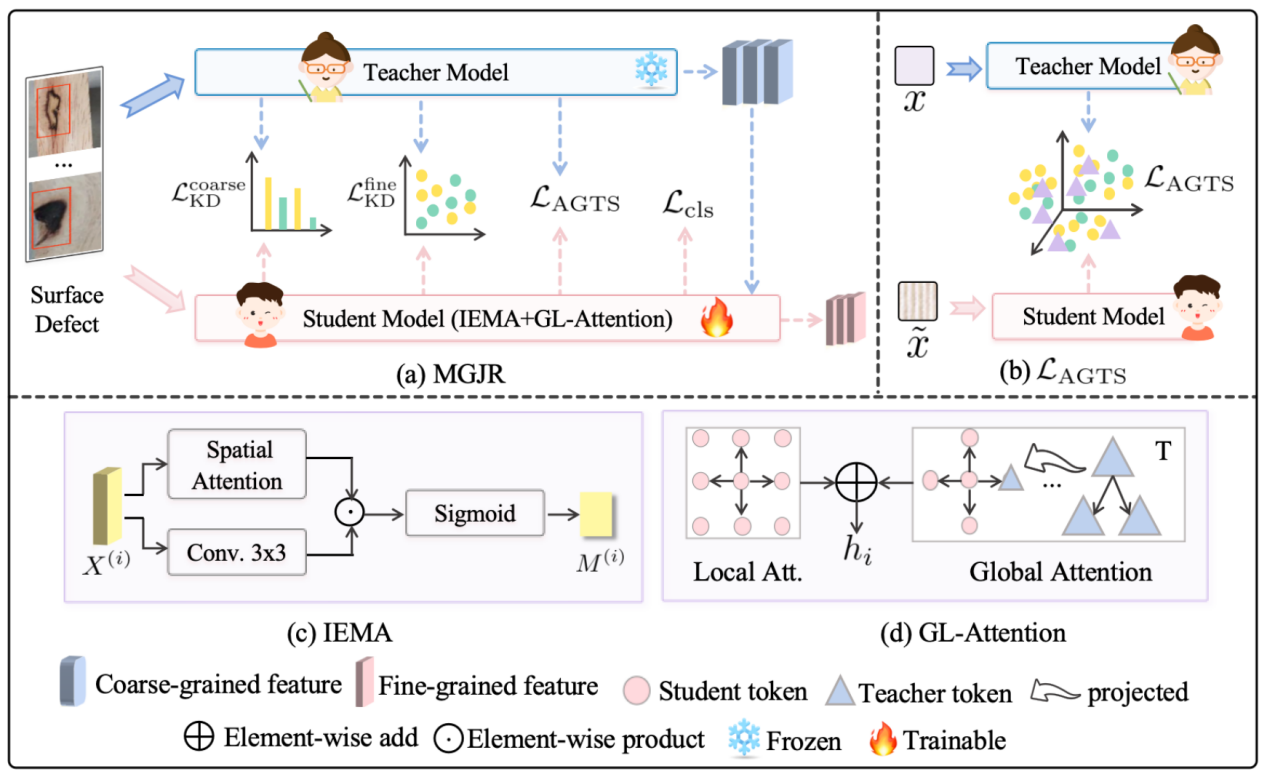
图1. 提出的 MGJR 框架的总体架构。(a).MGJR 框架示意图。(b).锚点引导训练策略 (AGTS) 示意图。(c).集成高效多注意力 (IEMA) 模块示意图。(d).全局-局部注意力 (GL-Attention) 机制示意图。
大量实验表明,MGJR 在 NEU-CLS 数据集上实现了 99.98% 的准确率,并在多个工业基准测试中始终优于先前的方法。MGJR 在噪声环境也取得最佳表现,说明MGJR具有良好的鲁棒性。此外,如图2、3所示,本研究做了一系列消融分析实验,来进一步探索MGJR架构的有效性和可解释性。
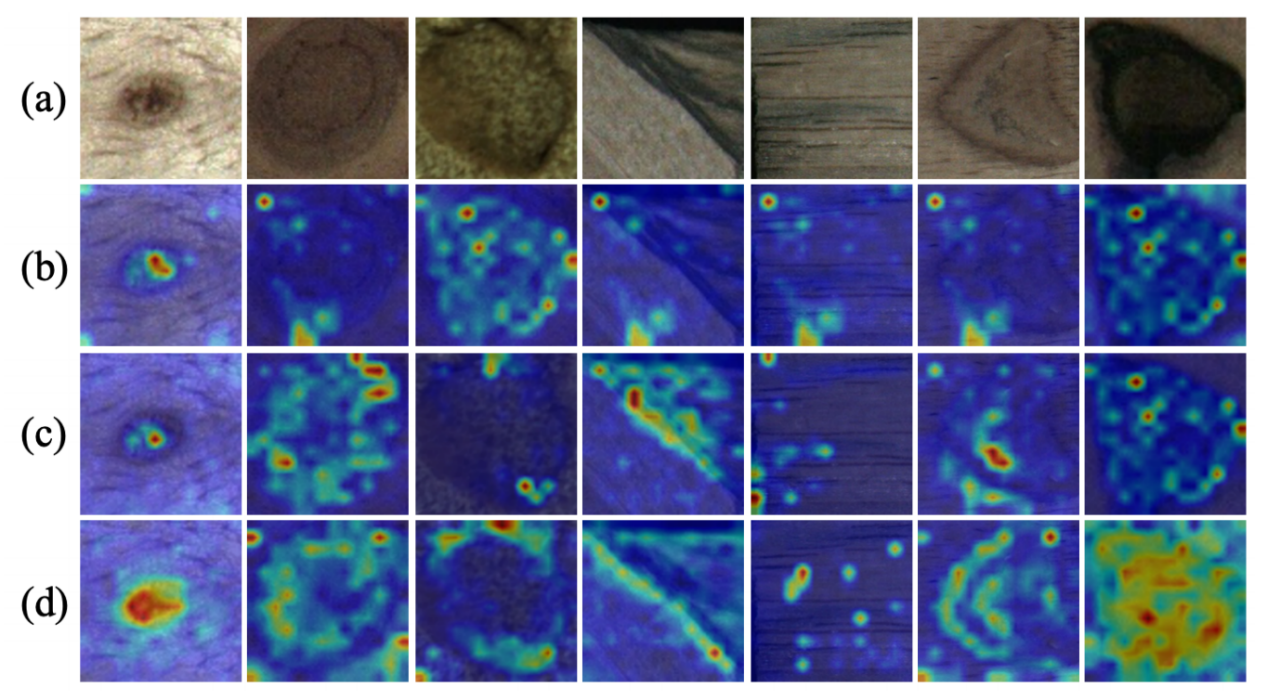
图2. MGJR框架的注意力机制可解释性
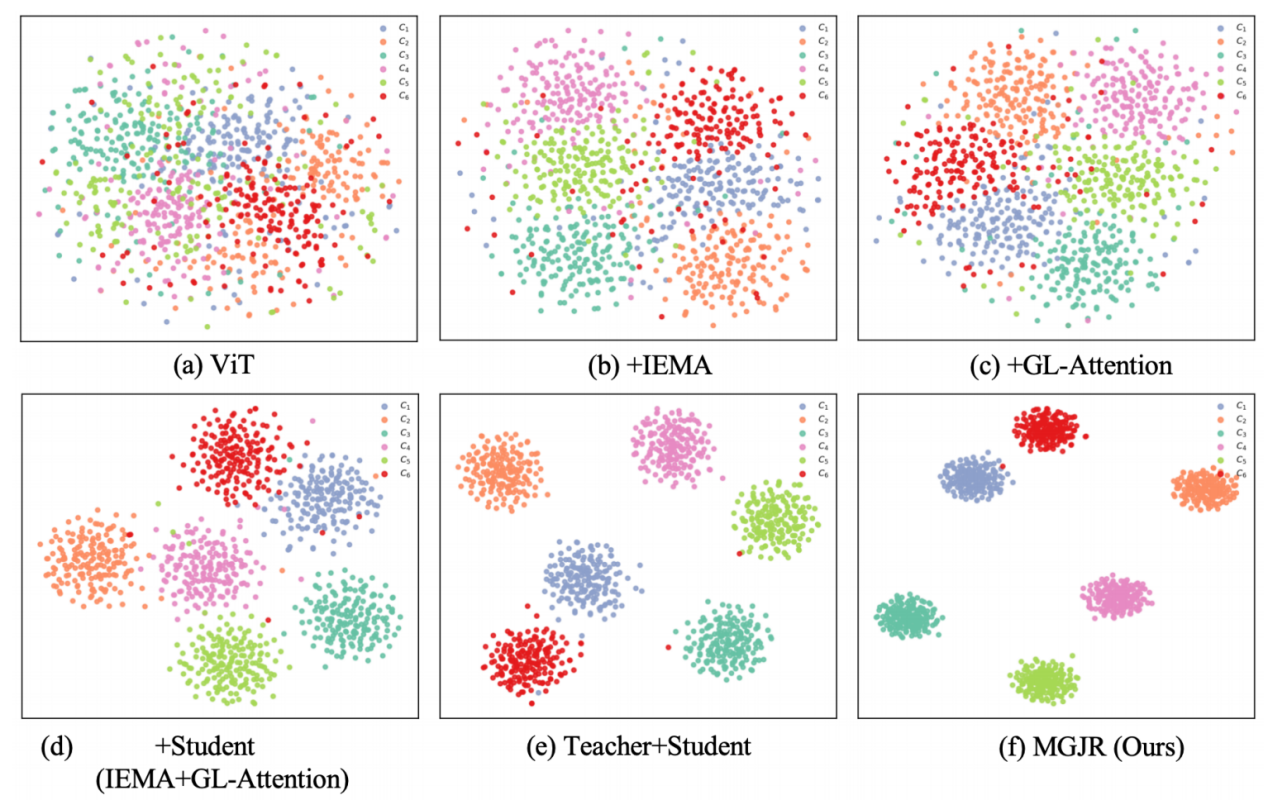
图3. MGJR在DAGM2007上特征嵌入的 t-SNE 可视化分析
为了证明模型在实际环境中的有效性,本研究将MGJR应用于实际工业环境中,用于解决木材表面缺陷检测的问题。如图4所示,实际工业环境。如图5所示,本研究历时一年构建了一个包含 26 种缺陷类型和 55,060 张来自真实工业环境的图像的木材表面缺陷数据集。MGJR 在实际工业环境中取得了最佳性能,验证了其在实际应用中的适用性。
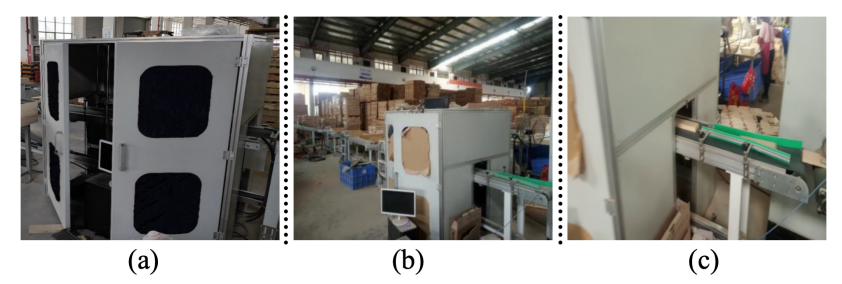
图4. 实际工业环境
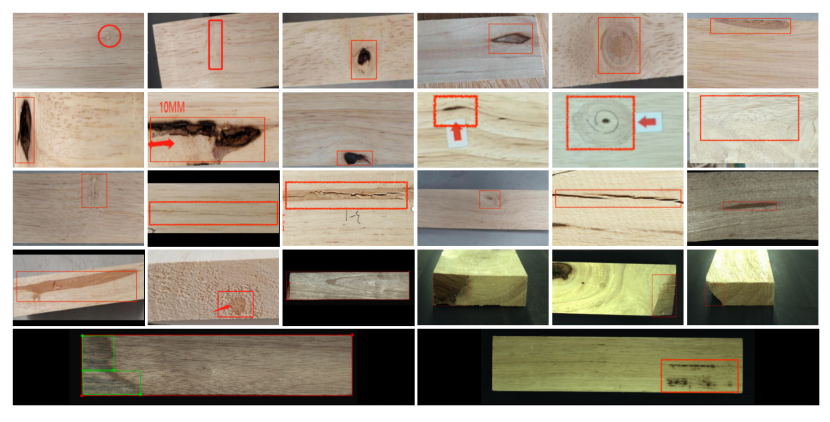
图5. 采集到的实际工业环境中26种缺陷类型
延伸阅读
《Journal of Industrial Information Integration》为中科院一区TOP期刊,聚焦于工业向集成化和信息化转型的主题。该期刊旨在推动和传播工业信息集成领域的最新进展,分享关于工业集成和工业信息化相关的挑战、问题和解决方案。
Magic Lab,是智能机器人与先进制造创新学院智能机器人研究院和智能机器人教育部工程研究中心的主要研究团队之一,智能机器人与先进制造创新学院副院长、智能机器人研究院院长甘中学教授为实验室首席PI。Magic Lab主要依托上海市人工智能市级重大专项,面向国家《新一代人工智能发展规划》中的群体智能理论、自主协同控制与优化决策理论、群体智能关键技术等重要科学方向,融合非线性动力学、模式识别、计算神经科学、强化学习、集群智能等多领域的理论与方法,重点探究人机物协同与智能融合的科学原理,突破异构群体行为协作与动态演变的关键技术,构建智慧交通与智能制造等场景下的异构集群交互系统。






