
 搜索
搜索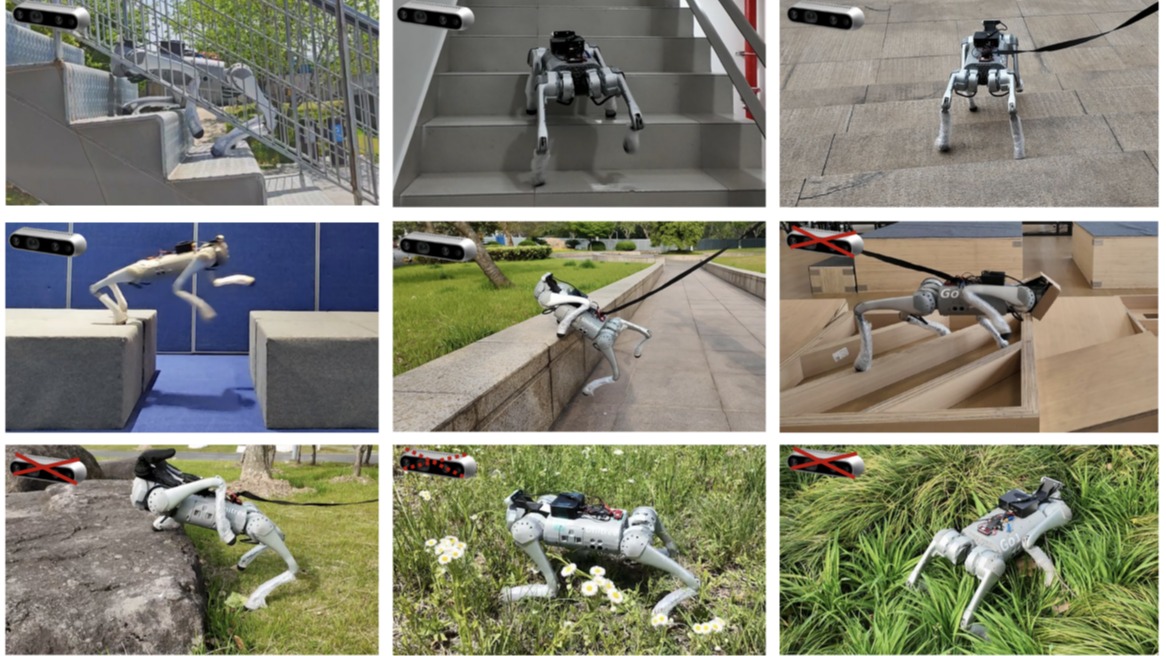

近日,复旦大学智能机器人与先进制造创新学院认知与智能技术实验室(简称CITLab)撰写的题为《RENet: Fault-Tolerant Motion Control for Quadruped Robots via Redundant Estimator Networks under Visual Collapse》的学术论文被国际机器人和自动化领域Top类期刊IEEE Robotics and Automation Letters (RAL-2025)录用。论文主要完成人为2023级硕士生张钺奇(共同第一作者)、2024级直博生钱荃橙(共同第一作者)、2023级博士生侯泰先,翟鹏青年研究员与张立华教授为通讯作者。
论文简介
基于视觉的户外环境运动控制对四足机器人提出了巨大挑战。在真实环境部署中,如何实现精确的环境预测并有效应对深度传感器噪声仍面临巨大挑战,这严重限制了此类算法在户外的应用。为解决视觉运动控制在部署中的这些问题,本文提出了一种冗余估计器网络(Redundant Estimator Network, RENet)框架。该框架采用双估计器架构,在机载视觉失效的情况下,既能保证运动性能的鲁棒性,又能维持部署的稳定性。通过在线估计器自适应机制,我们的方法能够在处理视觉感知不确定性时,实现不同估计模块之间的无缝切换。实地机器人实验验证了该框架在复杂户外环境中的有效性,尤其在视觉感知退化的场景中展现出明显优势。该框架显示出其作为一种实用方案,在复杂野外条件下实现可靠机器人部署的潜力。
主要工作

图1 RENet框架在各类户外场景中出鲁棒性能展示
该研究提出了冗余估计器网络(Redundant Estimator Network, RENet)是一种面向四足机器人运动的单阶段学习框架,它采用双估计器架构。该冗余设计在视觉传感器失效时提升了容错能力。在训练过程中,该框架能够实现估计器输入之间的平滑切换。在真实部署中,引入了一个自主估计器选择模块,用于检测视觉噪声并及时触发切换。
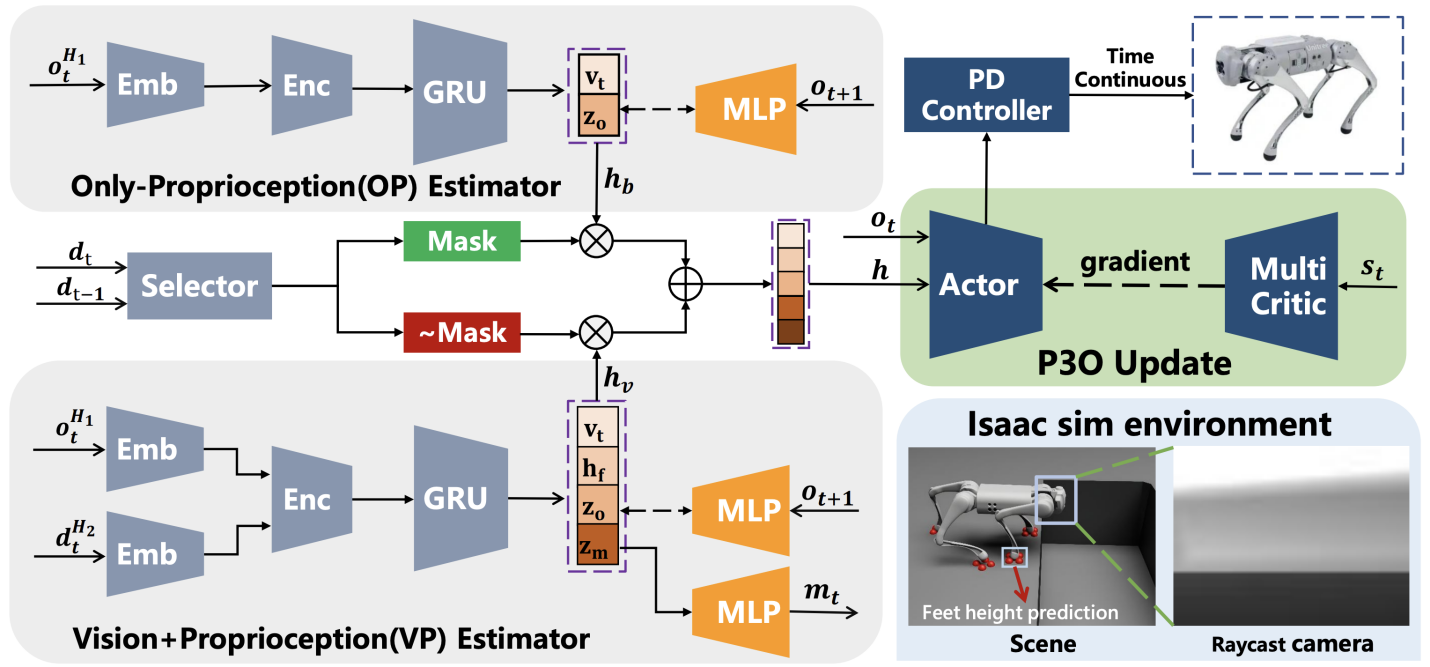
图2 RENet运动控制框架
图2展示了RENet运动控制框架,灰色方框表示以 10Hz运行的估计器模块;绿色方框表示以 50Hz 运行的 P3O actor-critic 架构;蓝色方框表示仿真环境。我们采用光线投射(raycasting)快速生成深度图像,用于策略训练。Emb表示嵌入模块,用于将输入数据压缩为低维潜在变量;Enc表示编码器模块,负责整合在不同时间步采集到的数据特征;GRU指门控循环单元(Gated Recurrent Unit),一种循环神经网络,用于融合历史信息特征。橙色的 MLP表示框架中的解码器或目标编码器,两者在部署阶段均不使用。
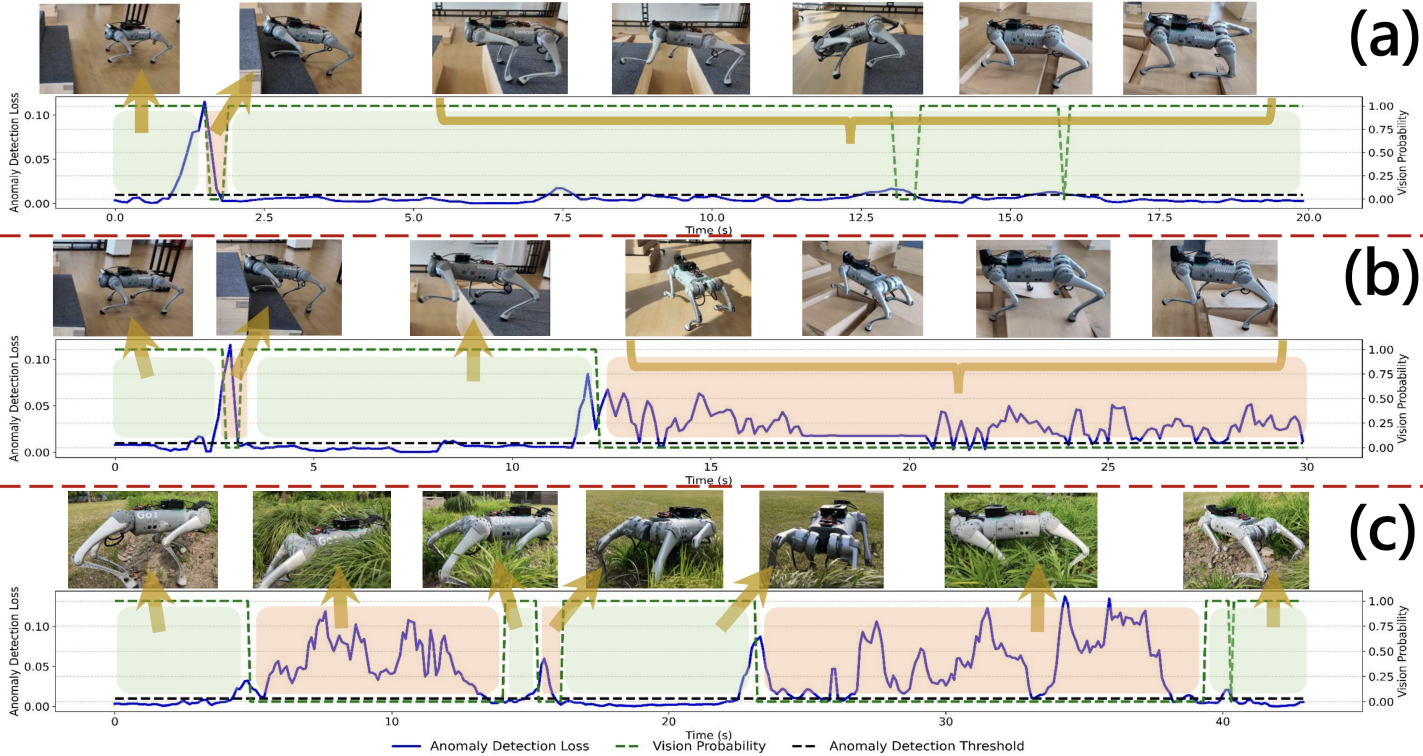
图3 真实环境验证RENet的鲁棒性与实时切换效果
图3展示了真实环境实验验证了RENet的鲁棒性与良好的实时切换效果。红色区域:自主切换至仅使用本体感知的估计器;绿色区域:选择本体感知+视觉进行预测;蓝色曲线:估计器的重建损失;绿色虚线:选择 本体感知+视觉估计器的概率(右侧 y 轴);黑色虚线:估计器切换的损失阈值(左侧y 轴)。除绿色虚线外,其余所有元素均参考左侧 y 轴。
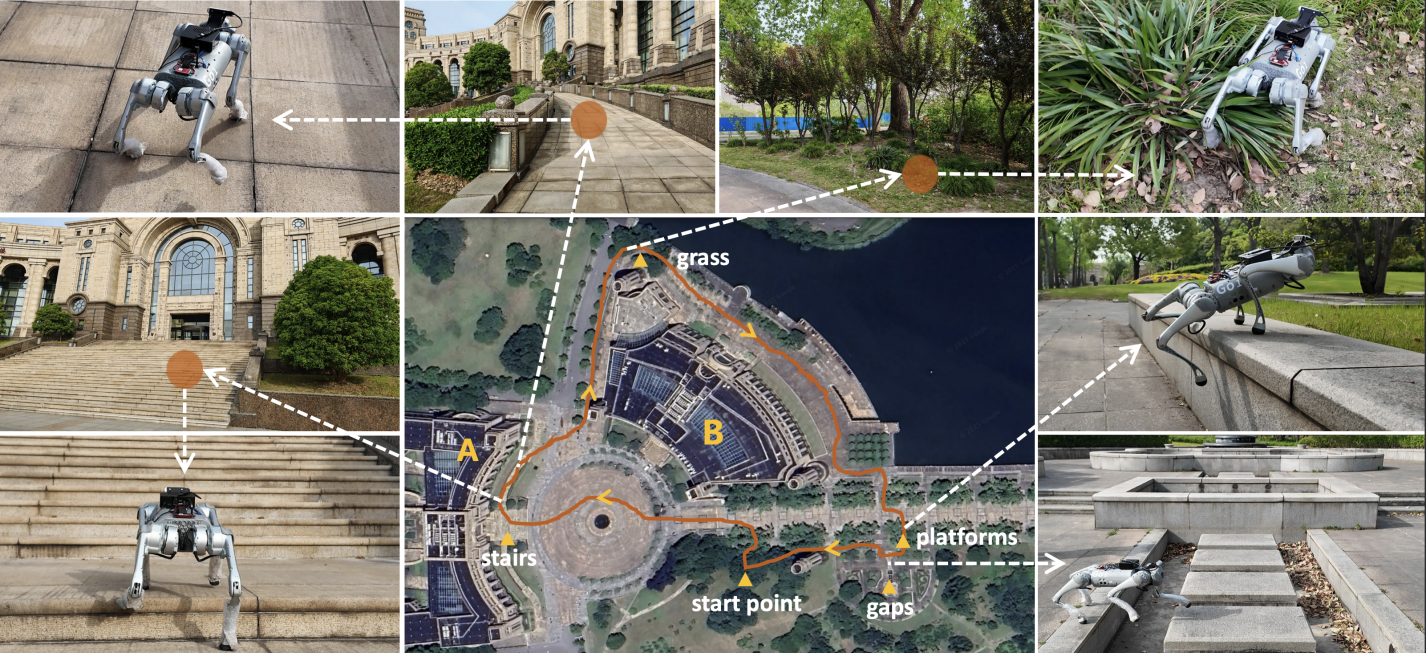
图4 长距离压力测试
该研究使用 Unitree GO1机器人在复旦大学江湾校区内进行了约25 分钟、1公里的户外测试。机器人首先穿越浓密的草丛,然后攀爬法学楼旁的楼梯。接着,它沿着楼前左侧陡坡走向图书馆,并穿过图书馆附近的草地。最后,机器人跨越图书馆南侧草地旁的平台和水池间的沟壑,最后返回起点,机器人在整个过程中均能稳定完成所有任务,无需人工干预。
我们的方法被应用在Unitree Go1机器人上,并广泛开展了仿真和硬件两部分实验,更多的实验参考https://RENet-Loco.github.io/网站中的视频,仿真和实机实验均证明了RENet的有效性。
延伸阅读
认知与智能技术实验室(原智能感知与无人系统实验室)隶属于复旦大学智能机器人与先进制造创新学院、复旦大学智能机器人研究院,近年来一直在机器直觉、人机物融合智能等新一代人工智能理论、物理仿真与数字孪生、智能感知与人机交互、行为识别与情感分析、智能机器人与无人系统、脑机解码与脑启发人工智能以及智慧医疗、智能网联汽车等领域开展交叉创新研究,相关学术成果发表于Nature主刊,中国科学,TPAMI,RAL,NeurIPS,CVPR,ICCV,ECCV,AAAI,ACM MM,ICRA以及IROS等国内外顶级学术期刊与会议。
RAL(IEEE Robotics and Automation Letters),是IEEE机器人与自动化协会(IEEE Robotics & Automation Society, RAS)于2015年6月1日推出的期刊,是机器人和自动化领域的顶级期刊之一。






