
 搜索
搜索
2025年8月16日至17日,第二届全国数据驱动动力学与控制学术研讨会在浙江义乌成功召开。本次会议由中国力学学会动力学与控制专业委员会主办,复旦大学义乌研究院与智能机器人与先进制造创新学院联合承办,《Acta Mechanica Sinica》《Theoretical and Applied Mechanics Letters》《力学学报》《动力学与控制学报》等多家学术期刊和义乌市科学技术协会、上海市力学学会协办。中国科学院院士、北京理工大学胡海岩教授,中国科学院院士、哈尔滨工业大学李惠教授,欧洲科学院院士、香港城市大学陈关荣院士等知名专家代表出席,国内知名高校和科研院所300余名专家学者和学生参会,深入探讨数据驱动的动力学与控制发展新方向。

16日上午研讨会由大会共同主席、复旦大学智能机器人研究院副院长徐鉴教授主持。
复旦大学党委常委、副校长、智能机器人与先进制造创新学院院长姜育刚教授在欢迎辞中表示,动力学与控制学科是智能机器人与先进制造装备的基石,对智能体科技的发展具有不可替代的基础支撑作用。希望本次研讨会能成为连接动力学、控制科学、计算机科学与技术等多学科的开放枢纽,以数据驱动为有力工具,推动相关领域的协同进步。

大会共同主席、中国力学学会副理事长、北京理工大学田强教授,在代表学会致辞中指出,“数据驱动”是当前力学研究的重要变革与发展趋势。鼓励学者关注国家在相关领域重大项目布局,希望借义乌开放包容的创新精神,促进前沿思想的碰撞与交融。

国家自然科学基金委员会孟庆国研究员在分享中指出,当前人才和项目评审标准已转变为“成果+”,更注重成果影响力和解决重大问题的能力。鼓励科研工作者围绕理论、问题、方法、运用四个方面,通过抓住极端条件、注重学科交叉等方式提升研究格局。

大会共同主席、中国力学学会动力学与控制专业委员会主任、北京航空航天大学王青云教授,在致辞中系统阐述了数据驱动为动力学与控制学科带来的新机遇。表示数据驱动正成为推动学科发展的重要引擎,并为国家产业升级与科技自立自强提供坚实支撑。

义乌市副市长高晋代表市政府致辞,介绍了义乌作为“世界小商品之都”,已成功培育信息光电和新能源汽车两大千亿级现代制造业集群,未来将聚焦“415X”先进制造业集群,努力成为数据驱动技术创新与应用转化的重要策源地。

大会共同主席、复旦大学智能机器人研究院副院长徐鉴教授热烈欢迎并诚挚感谢与会专家共聚义乌,研讨数据驱动动力学与控制最新研究进展。他表示,“数据驱动”已成为连接动力学理论与智能控制实践的桥梁,而“知识引导”则让AI不只是黑箱。

上海交通大学孟光教授、清华大学李俊峰教授、北京航空航天大学王青云教授、北京理工大学田强教授、宁夏大学彭志科教授、南京航空航天大学王在华教授、浙江大学黄志龙教授、天津大学丁千教授、北京空航天大学乔栋教授和华中科技大学王琳教授主持邀请报告,十位专家学者围绕非线性系统的数据建模、流固耦合系统的机器学习建模、复杂网络的能控性分析、多模态世界模型、人形机器人训练场等多个前沿热点领域,全面展现数据驱动动力学与控制领域的最新研究成果与未来发展趋势。
胡海岩 教授(北京理工大学):非线性系统的数据建模和降阶

李惠 教授(哈尔滨工业大学):桥梁流固耦合的机器学习建模方法

陈关荣 教授(香港城市大学):基于数据的复杂网络鲁棒能控性分析

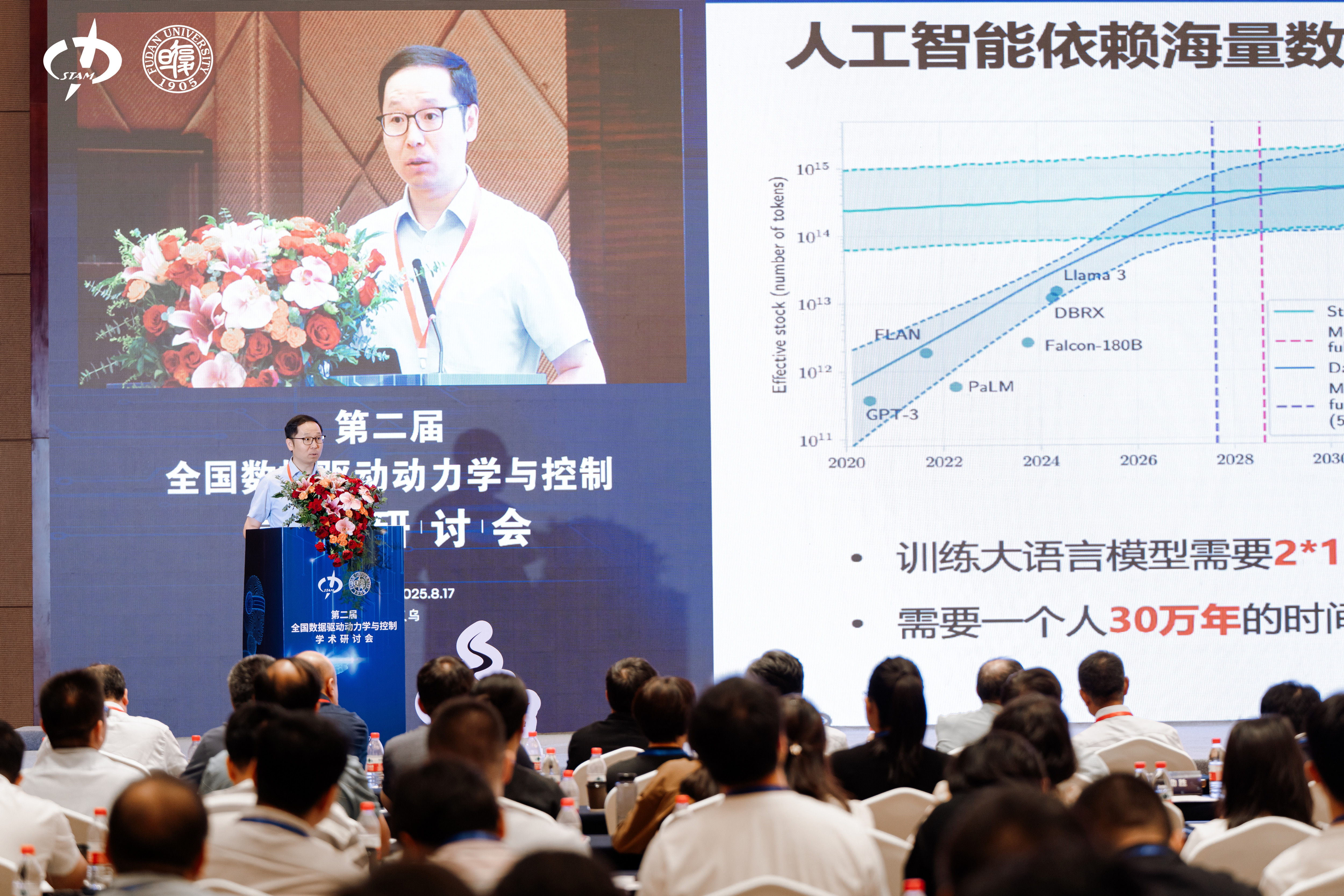
姜育刚 教授(复旦大学):多模态世界模型:感知、生成、决策
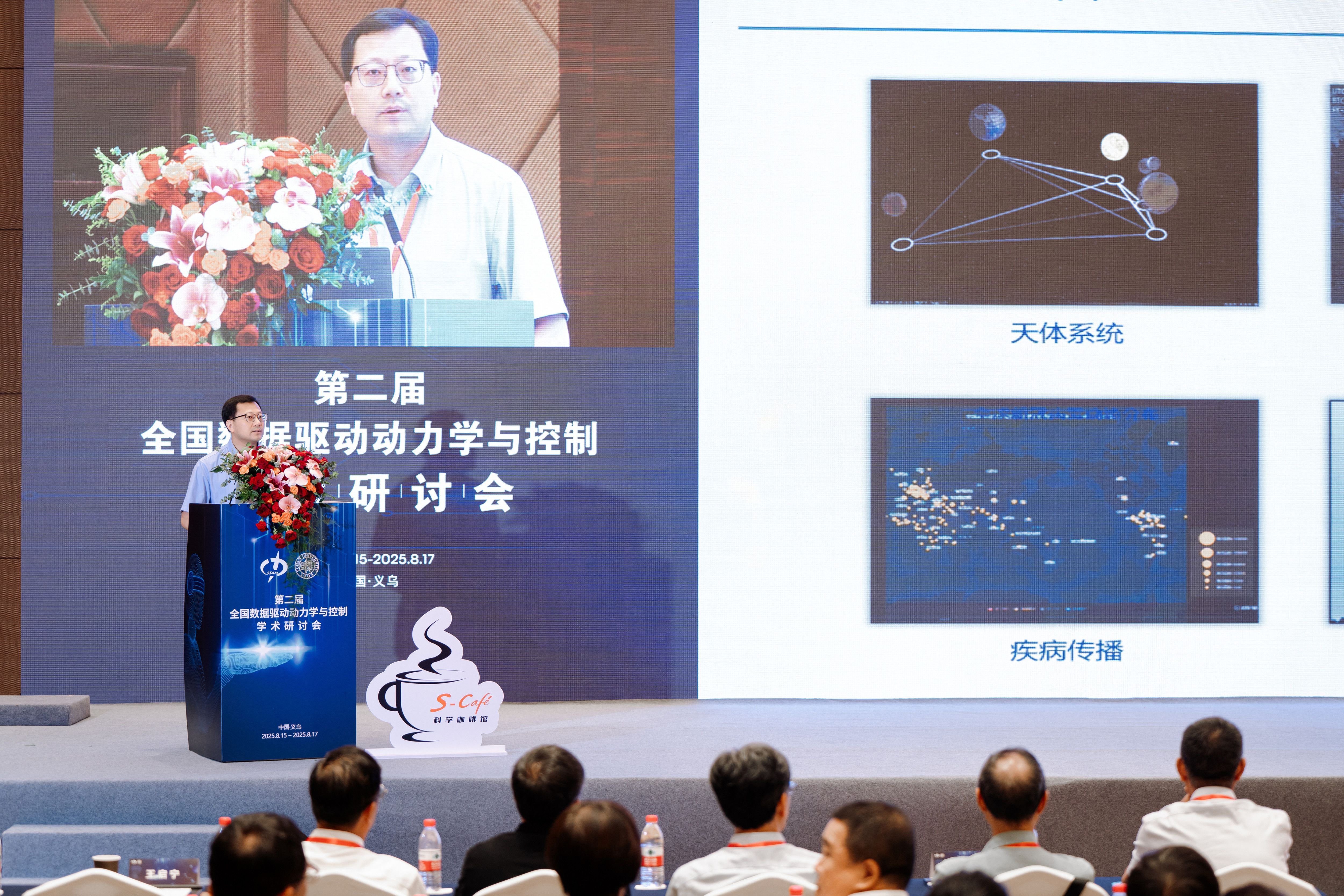
杨博 教授(吉林大学):复杂网络的动力学基础模型
江磊 研究员(上海人形机器人创新中心):人形机器人训练场:具身智能大数据模型的数据工厂

江俊 教授(西安交通大学):结合状态空间离散思想与机器学习的非线性系统动力学分析方法研究
彭海军 教授(大连理工大学):多体系统动力学的保结构机器学习方法

顾晓辉 副教授(石家庄铁道大学):从“人工”到“智能”的轨道交通装备故障诊断与运维技术

方虹斌 教授(复旦大学):仿蠕虫机器人折纸结构设计及其数据驱动动力学建模

17日的六场分论坛中,近70位报告人分享了最新的研究进展,内容涵盖数据驱动动力学与控制的各个前沿和交叉领域。与会者踊跃提问、积极探讨,在交流中迸发思想的火花。
专题一: 复杂系统数据驱动动力学建模与分析 (召集人:都琳,郭铁丁)
专题二: 数据驱动的系统辨识与载荷识别 (召集人:程长明,侯磊)
专题三: 智能系统的机器学习决策与控制 (召集人:马志赛,郝宇清)
专题四: 数据驱动的振动控制与能量调控 (召集人:周加喜,孙秀婷)
专题五: 机器人感知控制数据驱动闭环 (召集人:罗凯,马道林)
专题六: 人工智能方法在交叉学科中的应用 (召集人:韩芳,宋自根)

本次研讨会的成功召开,为我国动力学与控制领域专家学者提供了高水平、深层次的交流平台,有力推动数据驱动方法与传统力学研究的交叉融合,为该领域的持续创新和高质量发展注入了新的思想和动力。







