
 搜索
搜索

2025年7月26日,复旦大学可信具身智能研究院带着自主研制的“自适应视触觉AI传感器”,在2025世界人工智能大会(WAIC 2025)上首次公开亮相。大会现场,国务院总理李强、上海市委书记陈吉宁等领导亲临指导,姜育刚副校长做了汇报。
团队自研的视触觉传感技术,可以让机器人拥有类似人类皮肤的“触觉神经”。搭载这一技术的触觉夹爪可精准感知细微接触力,稳稳夹起像嫩豆腐、薯片和果冻这样的易碎物体,并摆出各种造型,真正实现“柔中带感,触而能知”。
这项技术的核心在于通过内置摄像头捕捉特制材料中微小颗粒在受力时的形变,借助AI模型将复杂的触觉信号转化为高维视觉数据,精准还原各方向的受力情况。其具备三大技术亮点:一是柔性界面如同人类皮肤般柔软贴合,且高度耐磨,能适应复杂表面;二是可感知多维受力,包括正压力、切向力、甚至扭转力,实现“触之有感,动中可辨”;三是灵敏度极高,空间分辨率达到每平方厘米4万个感知点,感知精度甚至超越人类指尖。现场演示中,一块嫩豆腐、一片果冻被“温柔之爪”轻轻提起,毫无破损,瞬间征服全场。
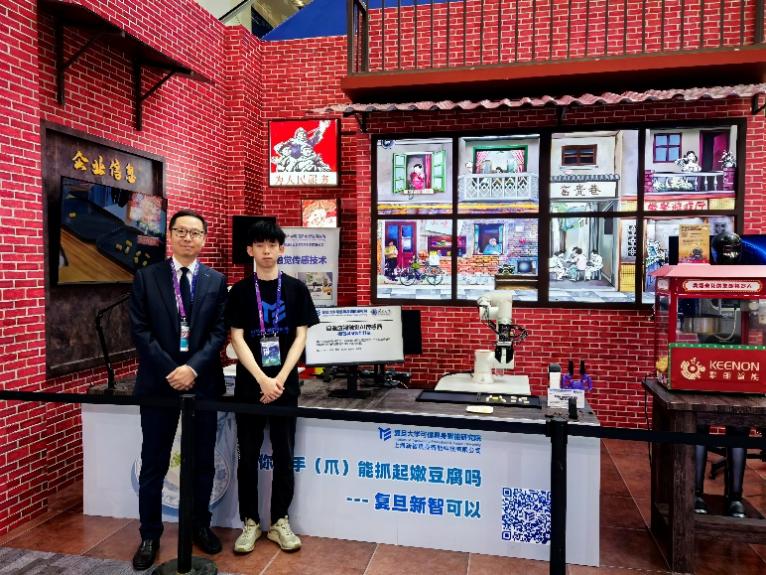
WAIC 2025成果展示现场
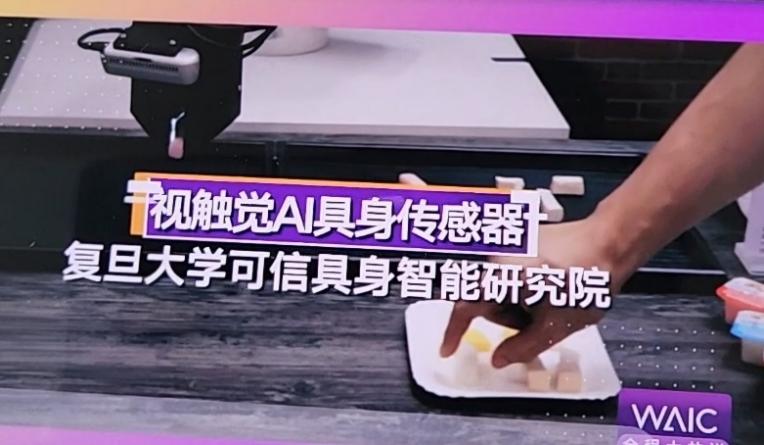
触觉夹爪稳稳夹起嫩豆腐,豆腐完好无损
目前,这项创新的视触觉传感技术已成功应用于机器人灵巧手和夹爪,在高精度分拣和精细化操作等任务中表现出色,相比传统电子皮肤,成本降低近50倍,性能显著提升,展现出广阔的应用前景和产业化潜力。
姜育刚副校长表示:“复旦大学可信具身智能研究院致力于具身智能领域的前沿理论研究、关键技术攻关与成果转移转化,通过整合计算机视觉、自然语言处理、机器人学、生物力学、控制系统及科技伦理等多学科力量,研发具有自主探索能力、持续进化特性且符合人类价值观的智能体,为未来人机协同与智能社会建设提供核心驱动力。”
此次发布的高精度、低成本的视触觉传感器,将进一步融合触觉多模态双脑架构、XR高精度机器人/机械臂遥操作软硬件系统、以及世界模型实时优化学习系统,为构建面向精细化操作的下一代具身智能大模型提供关键技术支撑。

自适应视觉触觉传感系统给机械夹爪加上了比人类更敏感的皮肤

搭载了视触觉传感技术的触觉手指,未来也将投入灵巧手/仿生假肢应用领域






