
 搜索
搜索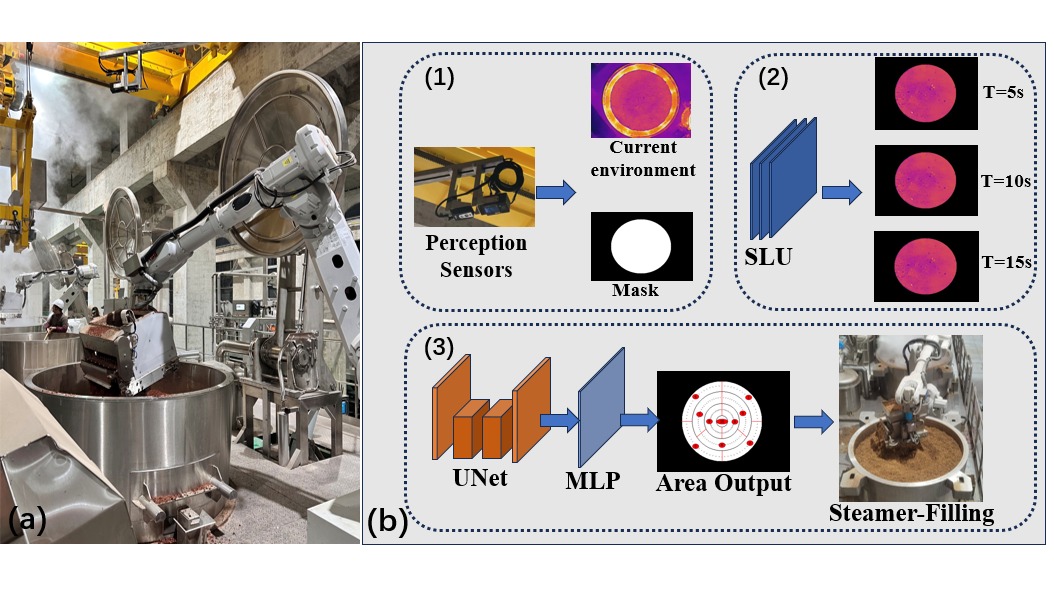

2025年6月,复旦大学智能机器人与先进制造创新学院智能工艺机器人及装备实验室的最新学术成果《SLU-DQN: A Model for Anticipatory Steam Detection for Steamer-Filling in Baijiu Intelligent Distillation Systems》被2025 International Conference on Intelligent Robots and Systems (IROS 2025) 录用。该论文的第一作者为博士生余佳,通讯作者为孙云权教授及齐立哲研究员
论文简介
让机器人学习到高级作业技能是一个极具挑战且具有重要应用价值的任务。在白酒生产中,“探汽上甑“工艺过程较为复杂,即在白酒上甑环节,需在酒蒸汽未冒出前,提前探出未来一段时间酒蒸汽将冒出的区域,并提前铺撒酒糟。此工艺目前需要大量经验丰富、洞察力敏锐的酿酒师进行精细操作。这不仅对人力资源要求极高,还增加了生产成本与操作难度。而白酒智能酿造系统中,“探汽上甑”工艺尚未实现,无法替代人工。针对这项关键挑战,本研究团队首次提出专门应用于白酒上甑蒸馏系统、实现“探汽上甑”工艺感知与决策端到端的SLU – DQN网络模型。
这项工作的主要贡献在于:
(1)针对当前白酒智能化酿造系统中尚未解决的“探汽上甑”技术难题,提出了一种基于SwinLSTM与UNet结合的深度Q网络(SLU-DQN)模型,模型通过SLU作为骨干网络实现红外上甑图像的时空动态特征提取,并结合 U-Net 模块完成多尺度特征融合,最终通过DQN优化上甑撒料策略,首次实现了在酒蒸汽冒出前对未来撒料区域的精准预测;
(2)设计了时空特征提取与动态变化预测相结合的模型框架,并制作了白酒探汽上甑基于时序的红外图像数据集,完成了时序预测与蒸汽区域预测任务有机融合,显著提升了预测的准确性与鲁棒性;
(3)提出了针对“探汽上甑”任务的多阶段奖励函数设计和性能评估体系,并通过定性与定量实验验证了模型的高效性和适用性,为白酒智能化酿造提供了技术支持与理论基础。
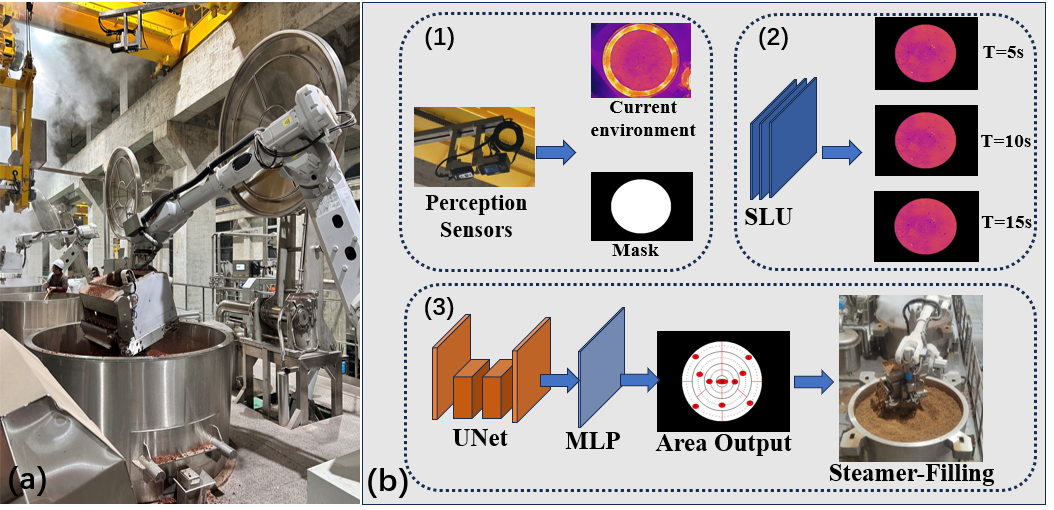
图1探汽上甑模型框架图
如图 1 所示为SLU-DQN模型工作流程,用于白酒探汽上甑的未来蒸汽检测。首先图像显示了白酒智能酿造系统,其中机械臂执行上甑撒料过程,使用感知传感器捕获环境状态信息。其次SLU-DQN模型工作流程,用于预测蒸汽填充过程中材料扩散区域:其中,感知传感器捕获当前环境并生成掩模。SLU模型通过SLU模块在不同时间步骤(T=5s、T=10s、T=15s)处理输入图像,进行时空特征提取和预测。最后上甑区域使用U-Net和MLP模型预测上甑撒料区域的输出。
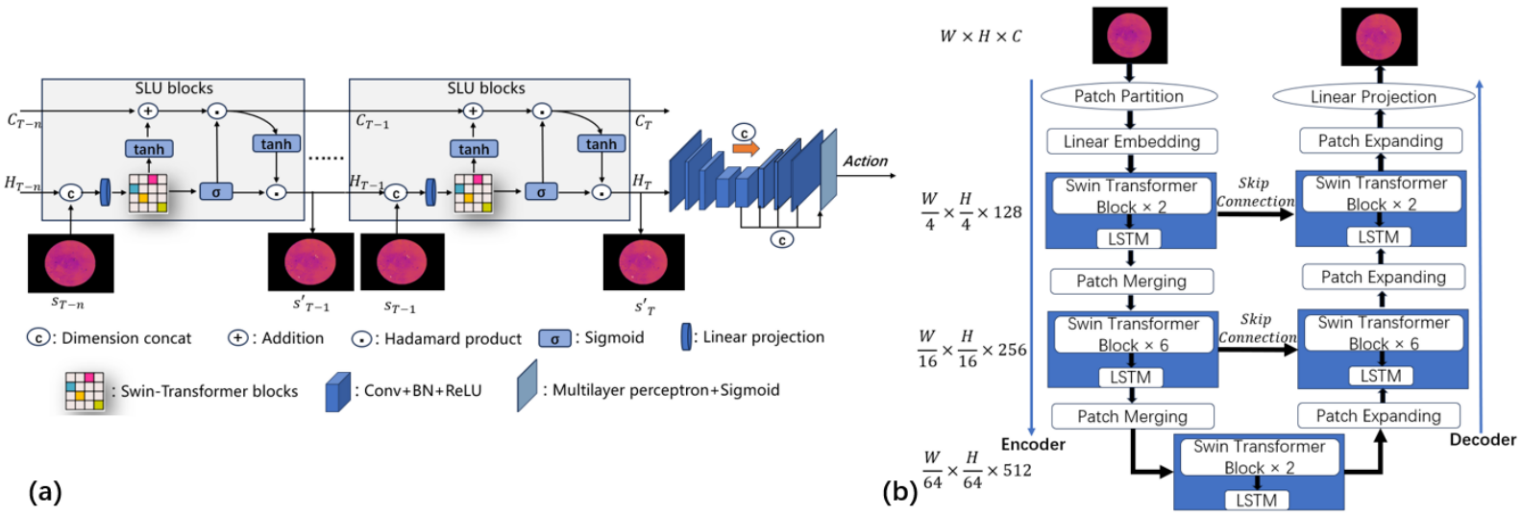
图2 SLU网络结构
如图2为这项工作提出的时序预测SLU网络结构,是将SwinLSTM为基本的图像特征提取模块,利用U型对称连接的模型结构思想搭建,该模型首先结合了Swin-Transformer 和长短时记忆网络(LSTM)的时空特征预测能力,用于处理连续红外图像序列的时空动态变化,模型通过输入红外图像时间状态序列{ST-n,ST-n+1,......,ST-1},提取图像基于固定时空的变化信息,预测未来S'T时刻的状态图像。图像每经过一次预测就要经历一个SLU模块。网络通过多个SLU模块进行迭代处理,在此过程中,隐藏状态(CT,HT)随着网络预测未来时间步图像的生成而变化。该过程能够捕捉时序依赖性,生成准确的预测结果。理论上每个SLU模块都能输出一个时间步长的预测图像。
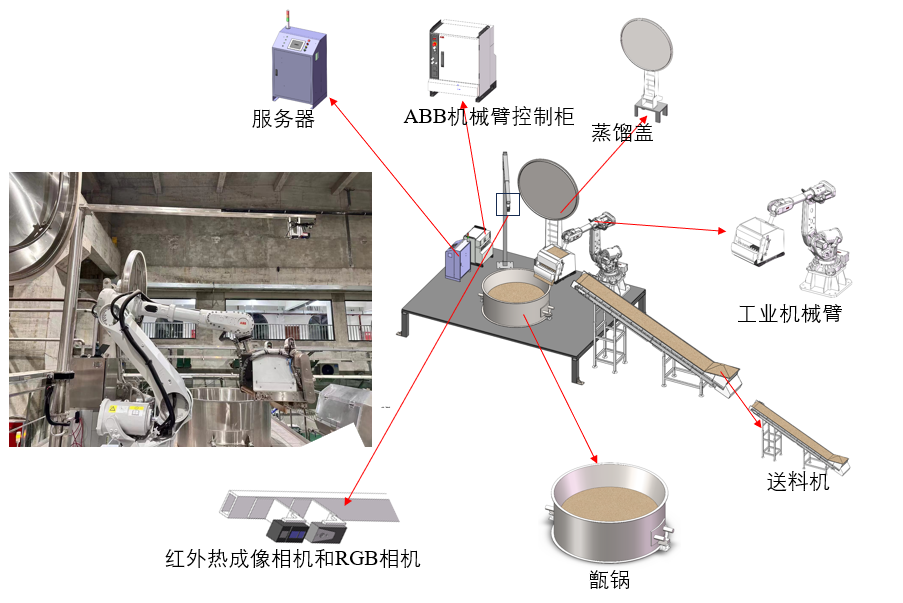
图3 探汽上甑数据采集与实验平台组成
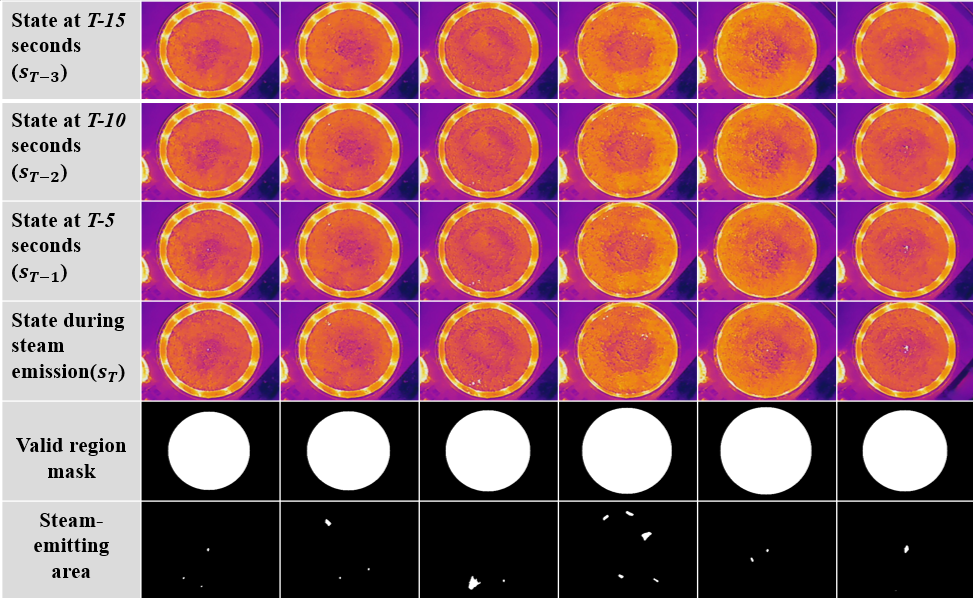
图4 探汽上甑红外时序图像
这项研究在真实白酒酒厂搭建了如图3所示的白酒上甑平台。该平台使用工业级红外热像仪采集上甑红外图像数据,并且基于此建立了首个白酒探汽上甑时序红外图像数据集,如图4所示。
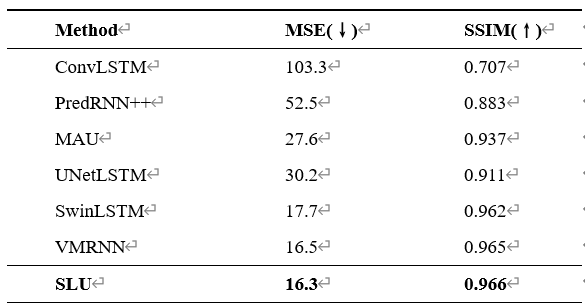
图5 公开时序数据集Moving MNIST对比实验结果
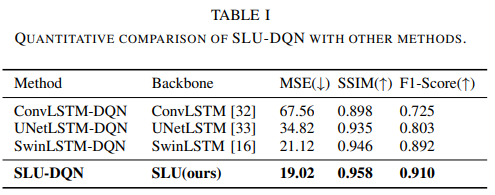
图6 探汽上甑时序数据集对比实验结果
图5和图6的实验结果表明,本研究提出的方法,无论是在公开数据集还是自建的探汽上甑数据集上,对于未来时刻的时序预测任务,性能均优于其他基线方法。
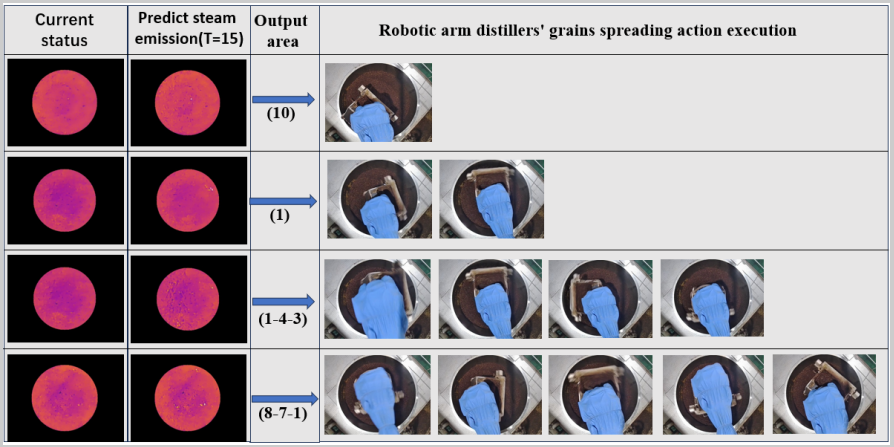
图7 探汽上甑智能上甑系统执行
图7展示了,本研究以SLU - DQN作为智能识别系统,成功将其应用于白酒上甑生产过程:从依据当前状态预测未来酒蒸汽冒出区域图像,到输出指令确定上甑撒料区域操作,再到机械臂执行上甑撒料动作。
延伸阅读
智能工艺机器人与装备实验室致力于机器人极端作业环境智能感知,自主规划、柔性控制与先进结构设计研究,研制面向复杂且高质量作业任务的技能型机器人与装备。面向国家重大需求,构建了从“基础理论研究-瓶颈技术攻关-首台套产品研制-重大产业应用”的一体化创新体系,相关研究成果发表于CVPR、AAAI、ECCV、ICRA、RA-L、Transactions on Robotics、机器人、控制与决策等国内外权威会议和期刊;荣获上海市技术发明奖一等奖、中国发明协会发明创新奖一等奖、第六届中国(上海)国际发明创新展览会金奖、上海发明协会2023高等院校发明选拔赛金奖、天津市科技进步奖二等奖等重要科技奖项;研制的大尺寸测量机器人、智能上甑机器人、柔性加工机器人已经在高铁、航空航天、文物修复、酿酒、制鞋制衣等领域实现产业化应用。国际智能机器人与系统会议(IROS)是全球机器人研究社区的顶级国际会议,致力于探索智能机器人和智能机械领域的科学技术前沿。
供稿:齐立哲






