
 搜索
搜索

在复旦大学智能机器人与先进制造创新学院,“智能体”不是一个抽象的概念,而是一扇通向世界多重尺度、多重形态、多重物理机制的大门。这里的学生不仅研究机器如何“动”,更关心“为什么这样动”“从哪里学会动”。
一位在校园里追寻植物螺旋形变和一位立志将飞行器变成“具身智能体”的本科生,从地面到天空,他们的故事共同描绘出复旦智能体研究的广阔维度。
从一片叶的旋转开始:本科生穆逸菲同学的植物手性研究
“我是在不起眼的灌木丛里发现的它。”智能机器人与先进制造创新学院、航空航天系2022级理论与应用力学专业本科生穆逸菲同学回忆起她研究项目的起点时,脸上闪着光。她在导师徐凡教授的指导下,选择了一个新颖的方向:植物失水变形形貌力学研究。要观察叶片细胞结构在失水后的变化,并发现其中的规律机制,起初只能靠碰运气。为了寻找合适的研究对象,她几乎走遍了整个复旦校园,每一处绿植、每一片卷叶都成了他潜在的研究素材。
最终,她锁定了一种在复旦常见的灌木植物,它的叶片肉眼看柔软而不起眼,在电子显微镜下却具有典型的手性结构,并且随着叶片的生长和失水,手性会神奇地蜿蜒产生。
“植物并不计算,却能通过细胞间非对称的生长来形成稳定而复杂的空间结构。这是一种天然的具身智能。”穆同学从实验观察提取规律,为手性结构能改善叶片的生物功能的假设验证打下了基础,也为可能的柔性结构设计提供了全新灵感。
她的研究不仅让我们重新理解植物的“智能形变”,也让“从自然中寻找设计灵感”成为复旦智能体研究的一个美丽分支。

上天的智能体:本科生张钟尹同学探索之路——飞行器与具身智能的融合
而另一端的世界,属于天空。张钟尹同学是复旦大学智能机器人与先进制造创新学院、航空航天系2022级飞行器设计与工程专业本科生。在校学习阶段,张钟尹深刻体会到学科交叉的魅力。飞行器设计不仅涉及空气动力学、飞行力学等传统学科,还与控制理论、人工智能等领域密切相关。她意识到,只有将多学科知识融合,才能推动飞行器技术的创新发展。得益于学校开放包容的学习氛围,她逐渐对“具身智能”这一新兴理念产生了浓厚的兴趣,尤其是在飞行器领域的应用前景。
“我一直在思考,为什么鸟类能够在空中完成如此高难度的动作,而我们的无人机却需要依赖复杂的算法和传感器?能不能让飞行器‘更像生命体’,拥有对环境的自然感知和本能响应能力?”
在本科学习过程中,张钟尹逐渐认识到,具身智能与飞行器设计之间存在深刻的联系。低空飞行器与具身智能体都高度依赖高精度传感器获取环境信息。无论是低空飞行器的卫星定位,还是具身智能体的视觉摄像头,通过感知层获取和处理环境信息,为决策和行为提供依据,精准的感知是做出正确决策的基础,确保它们能实时了解周围状况,应对复杂多变的外界环境。
“传统飞行器更像是计算机器,而我希望未来的飞行器能够具备身体直觉,像生物一样灵活应对复杂环境。以扑翼飞行器为例,这类仿生飞行器通过模拟鸟类或昆虫的翅膀拍动,实现飞行和感知的融合,展现了具身智能在飞行器设计中的巨大潜力。”
她相信,具身智能与航空技术的结合,将为未来的空中机器人打开全新的认知与控制维度。未来,她计划深入研究飞行器的具身智能,探索如何将感知、决策与控制系统深度融合,推动低空飞行器的发展。

智能体的边界,由探索者重新定义
一个研究植物的形变,一个探索飞行器的结构;一个走在草地上仰望叶片的螺旋,另一个在风洞中思考飞行的灵动。他们共同书写着智能体的不同面向——
它可以受力,可以变形,也可以飞翔。
它可以从一片叶开始,也可以在万米高空展翅。
它不止是一种技术,更是一种对“生命性”的再发现。
正如这两位复旦学子所展现的那样,智能体的维度,不只是技术维度,更是想象力的维度。而复旦大学智能机器人与先进制造创新学院,正是那片让探索者将想象变为现实的土壤。
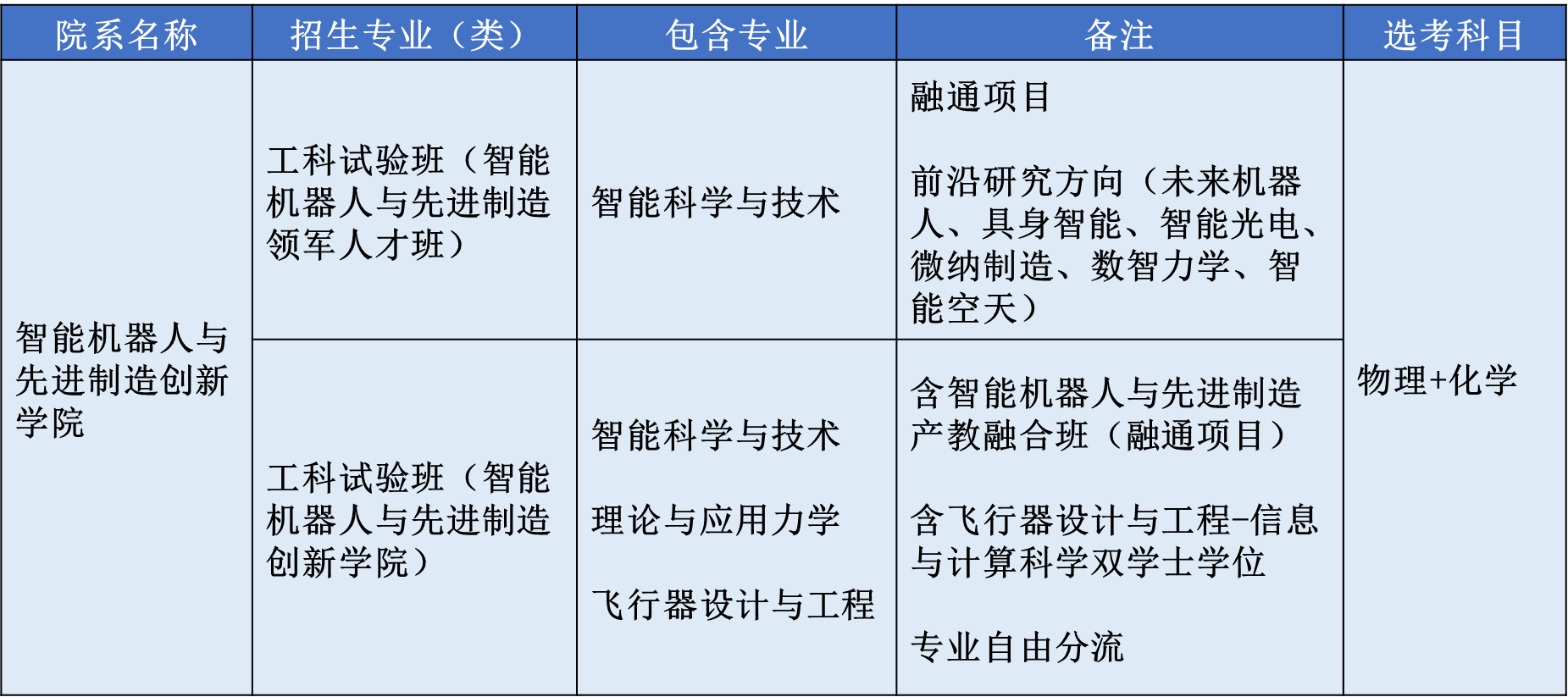
智能机器人与先进制造创新学院2025年招生方案
文案编辑:方虹斌
审 核: 柴宏宇






