
 搜索
搜索

在人工智能日益融入现实生活的今天,机器人不再只是逻辑的载体,更成为行动的化身。所谓“具身智能”,不仅关注机器人的“大脑”,更关注它的“身体”——它如何感知、如何运动、如何与环境交互。在复旦大学智能机器人与先进制造创新学院,一群青年学子正将智慧注入“形体”,用热情和创新探索未来机器人的无尽可能。
我们采访了三位正奋战在智能机器人前沿的复旦学子。他们的研究方向不同,但都围绕着一个共同主题:让智能真正“动”起来。
可解散、可重构:本科生尹晓文同学的多机器人系统探索
尹晓文同学是复旦大学智能机器人与先进制造创新学院2021级智能科学与技术专业的本科生,也入选了2024年度卓博学员。他正在参与一个极具挑战性的项目:可解散组合的多机器人系统。不同于传统的单体机器人,他的研究着眼于多个机器人单元之间的自主协作与重构能力。
“我们希望打造一种具有'群体智慧'的模块化机器人系统。每个单体模块机器人本身就是一个功能完备的智能体,能够独立运动、感知环境并完成特定任务;同时,它们又能像蚁群一样灵活协作,通过信息共享和协调行动来应对更复杂的挑战。这些模块还具备物理意义上的‘拼接’能力,能像乐高积木一样动态组合形成功能更强、能力更全面的仿蠕虫机器人复合体,从而执行单体无法完成的艰巨任务。”尹同学介绍说。他研究的多机器人系统,是一种更高层面意义上的群体具身智能系统,系统的形态可变、能力可拓展。
这一研究能够为灾后救援、空间作业、环境勘探等任务提供全新可能。“当每一个智能体都有‘形’、‘力’和‘群体意识’,我们就真正迈出了具身智能的群体进化之路。”

让机器人理解世界:硕士生谢思程同学的具身智能研究
作为智能机器人与先进制造创新学院、可信具身智能研究院2023级的硕士生之一,谢思程同学在导师吴祖煊副教授的指导下,专注于世界模型在推动具身智能发展中的关键作用。他表示:“世界模型在一定条件下具备对未来场景进行预测的能力。我想做的,就是利用它对未来的感知与规划能力,帮助机器人更好地完成任务。”
在研究中,谢同学聚焦于世界模型在视觉预测方面的应用,以增强机器人对动作执行过程的理解与预判能力。他引入扩散模型,以其对多峰分布良好的建模能力,实现机器人在多物体、多任务、多场景条件下的强泛化性能。“我所理解的具身智能,其目标不应只是制造用于特定环境的展示工具,而应具备在多样化环境中稳定运行的能力。”
目前,他的研究成果已在多个机器人仿真平台中得到验证,并成功应用于单臂机器人抓取的真实场景实验。他希望,这项工作不仅推动学术领域的进步,更能助力打造服务人类的机器人。

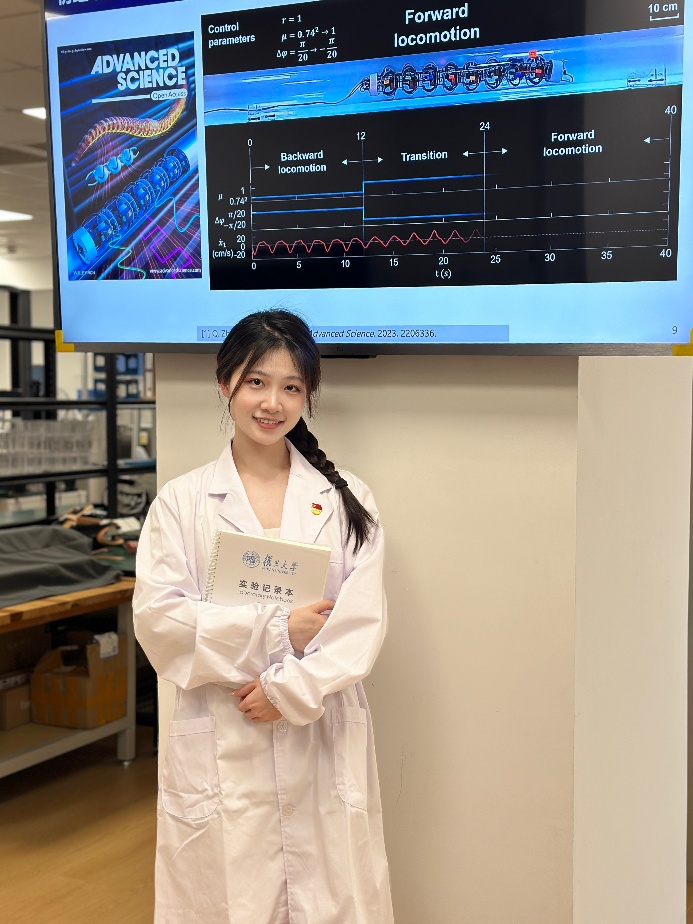
节律控制中的生命律动:直博生周沁彦同学的仿蠕虫机器人实践
智能机器人与先进制造创新学院、智能机器人研究院2020级直博生周沁彦同学则在另一端——更贴近自然的方向上展开了研究。她在导师方虹斌教授的指导下,致力于仿蠕虫移动机器人的中枢模式发生器(CPG)控制研究,通过模拟生物神经元网络的节律调控机制,为多单元仿蠕虫机器人构建高效自适应的运动控制体系。
“蚯蚓的蠕动看似简单,却是自然界中极具鲁棒性的运动范式。”周同学针对传统仿蠕虫机器人在动力学建模与多单元协调控制中的瓶颈,建立了“结构-环境-控制”耦合的机器人动力学模型,并提出了蚯蚓中枢神经系统启发的控制系统,通过非线性振荡器网络模仿蚯蚓神经元之间的协同机制,最终控制机器人实现在复杂地形下的稳定推进和步态切换。
该研究融合了仿生结构设计、非线性动力学分析和神经系统建模,代表了具身智能研究的“底层物理”探索。目前,相关成果已在模拟平台和机器人样机中获得初步验证,未来拟向工业管道检测、极端环境勘测等领域拓展,为复杂环境下的机器人应用提供生物启发式解决方案。
智能,不止于算法;形体,赋予它现实的意义
这三位学生的研究,展现了智能在不同层次、不同路径上的可能性。从多机器人系统中的结构智能,到个体机器人中的具身智能,再到仿蚯蚓机器人中的神经启发控制策略,复旦的机器人学子们正用自己的方式诠释:智能的未来,不止于算法,更源于身体与环境间的交响。
未来已来,而他们,正走在将未来化为现实的路上。
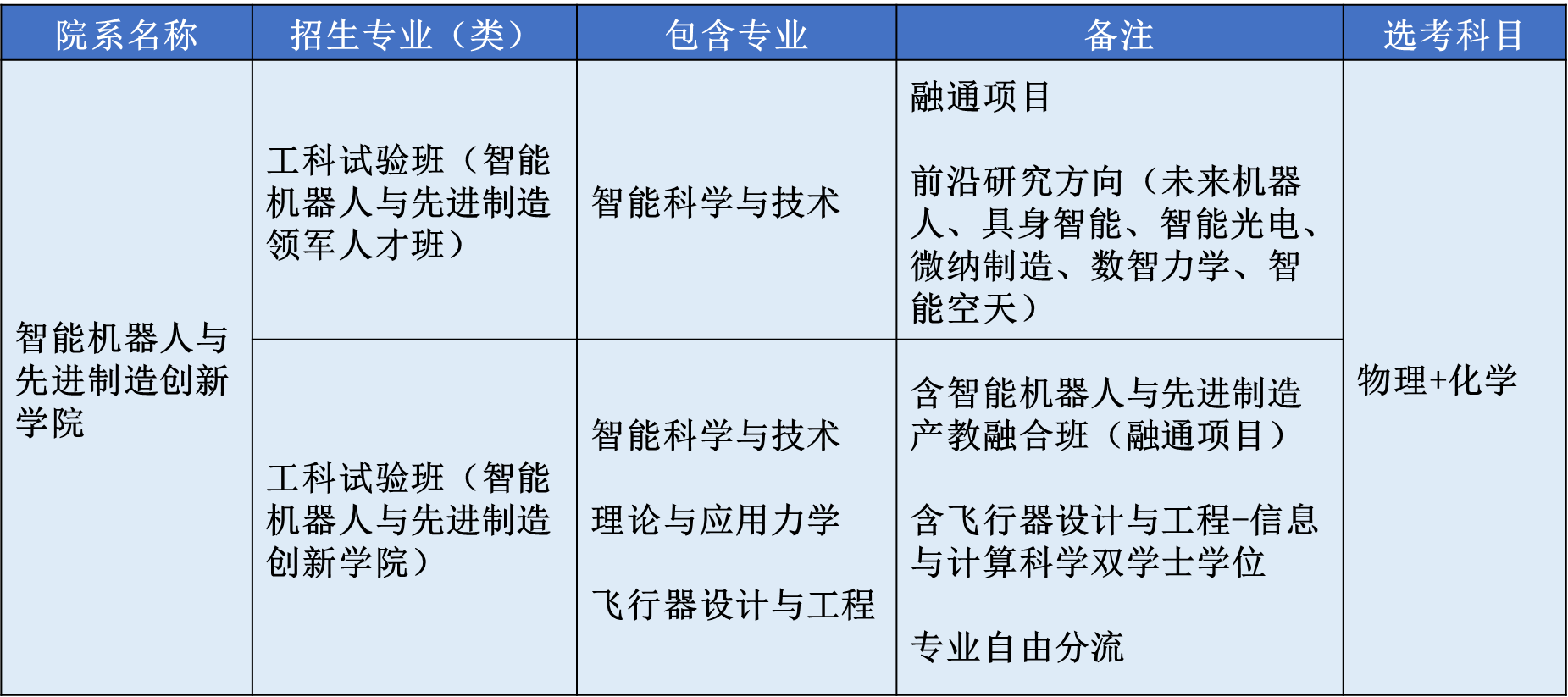
智能机器人与先进制造创新学院2025年招生方案
文案编辑:方虹斌






