
 搜索
搜索

近日,复旦大学智能机器人与先进制造创新学院仿生结构与机器人实验室(BSRL)在仿蠕虫移动机器人领域的最新研究成果——题为《Dynamic modeling and analysis for planar peristaltic locomotion of a metameric earthworm-like robot》(仿蠕虫机器人平面蠕动运动的动力学建模与分析)的学术论文,在机器人领域权威期刊《The International Journal of Robotics Research》发表。方虹斌教授为第一作者,20级直博生周沁彦为学生第一作者,徐鉴教授为通讯作者。
研究背景
受蚯蚓独特形态特征和运动机理的启发,仿蚯蚓机器人不仅能够穿越狭窄管道,还能够在平面环境中移动,并具备在狭小空间执行任务的能力(图1)。对于需要在复杂环境中实现平面运动的多单元仿蚯蚓机器人而言,准确预测其运动性能和动力学行为至关重要。然而,以往关于机器人平面蠕动运动的研究主要基于运动学模型,这些模型通常假设理想的锚固和驱动条件,未能充分考虑因摩擦力不足而导致的锚固失效和滑移等问题,从而导致实验结果与理论预测之间存在显著差异。本文首次建立了仿蚯蚓机器人平面蠕动运动的动力学模型(图2),突破了传统运动学模型对驱动力和摩擦力的理想化假设,能够更精确地预测机器人的运动性能和运动轨迹。
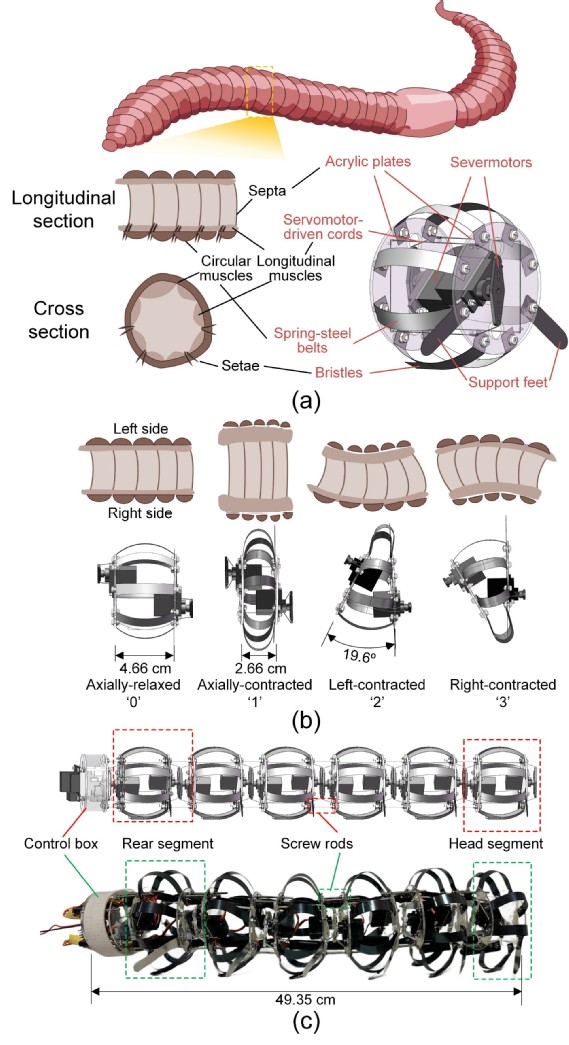
图1 仿蚯蚓移动机器人设计与实物照片
研究进展
本研究提出了一种基于比例-微分控制的作动力模型,使机器人单元在有限驱动力条件下能够精确达到目标构型,同时准确模拟了舵机的驱动过程。此外,构建了各向异性库仑干摩擦模型,通过实验测量获得了机器人单元在不同方向上的摩擦系数,从而有效描述了刚毛与地面之间的相互作用特性。为进一步提升模型精度,研究引入了放大系数以量化径向膨胀所产生的锚固放大效应,并采用修正系数对运动过程中因头部抬升导致的横向摩擦力变化进行了合理校正。
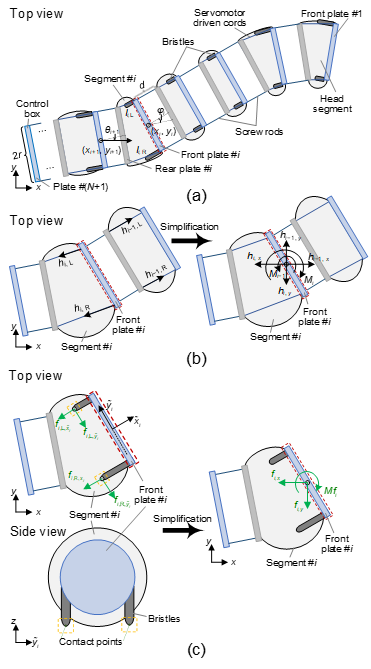
图2 仿蠕虫平面运动机器人的动力学模型
本研究通过对比运动学模型的预测结果、动力学模型的预测结果以及实验数据,从运动性能指标和运动轨迹两方面对动力学模型的准确性进行了评估。研究结果表明,所建立的动力学模型在运动性能指标的预测精度上显著优于传统的运动学模型,特别是在平均速率、轨迹斜率和轨迹半径等关键指标的预测中展现出明显优势(图3)。此外,动力学模型还大幅提升了运动轨迹的预测能力(图4),能够有效捕捉到运动学模型难以准确描述的非光滑粘滑动力学现象及推进力不足的情况(图5),从而提供了更为精确和全面的运动行为刻画。
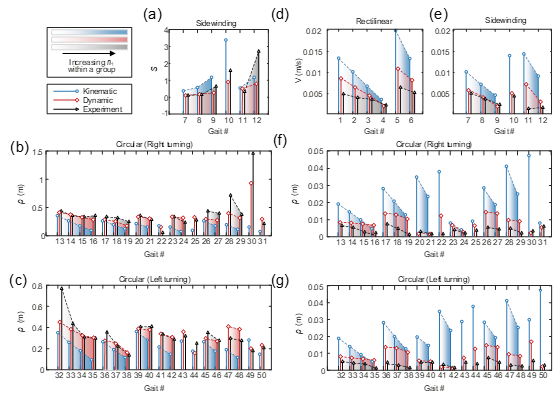
图3 运动学模型和动力学模型对运动指标的预测与实验结果的比较
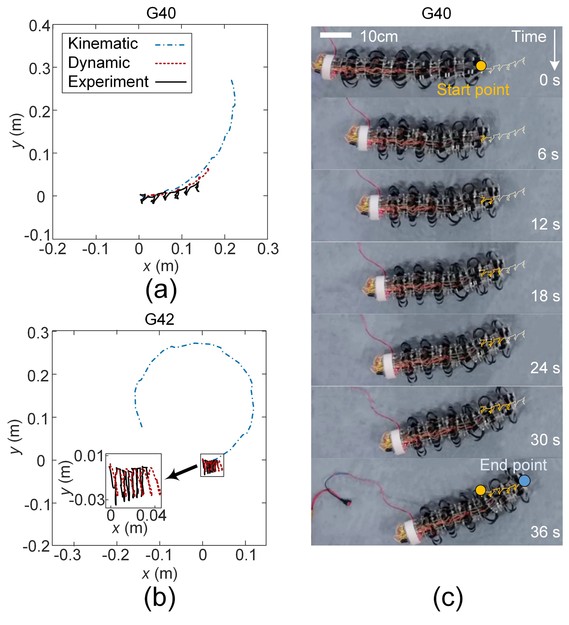
图4 机器人头部在右转圆周运动中的轨迹比较
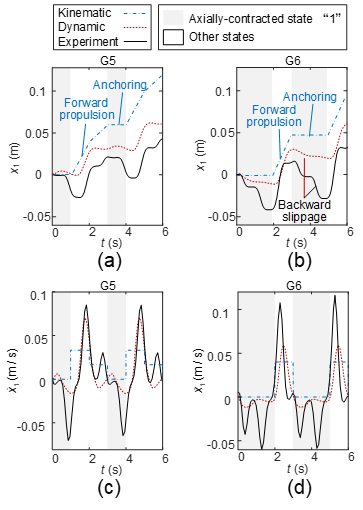
图5 动力学模型对粘滑现象和推进力不足现象的预测
未来展望
本研究不仅为复杂环境下仿蠕虫机器人的运动预测提供了有效的解决方案,还从动力学角度深化了对平面蠕动运动机制的系统性认识。未来的研究可进一步通过整合多元传感信息,构建“本体-环境”耦合的动力学模型,从而实现对机器人在复杂环境中动力学行为的实时描述和精准预测。
研究的项目基金资助信息
本研究获得了国家自然科学基金(11932015,12272096)、上海市基础研究特区计划(复旦大学 21TQ1400100-22TQ009)的资助。
仿生结构与机器人实验室介绍
仿生结构与机器人实验室(BSRL)隶属于复旦大学智能机器人与先进制造创新学院,由徐鉴教授和方虹斌教授领导,主要研究方向为:
○ 具有超常规静力学、运动学和动力学性能的仿生结构和仿生机器人开发
○ 基于可变结构和多驱动器的仿生多模态、模块化机器人的协同驱控
○ 智能假肢、外骨骼和人形机器人人机协同动力学与控制
○ 仿生移动机器人对可变工作环境的自适应与共融动力学
○ 基于数据驱动技术的仿生机器人系统建模、在线辨识和最优化控制
○ 基于可变拓扑结构的仿生机械超材料力-光-电-声多场耦合动力学
实验室围绕“仿生结构与机器人”这一主题开展了交叉创新研究,相关学术成果发表在Advanced Materials、Advanced Science, IEEE Transactions、International Journal of Robotics Research, Journal of the Mechanics and Physics of Solids、Mechanical Systems and Signal Processing、《力学学报》等国内外权威期刊与国际学术会议。






